

referenzanleitung val3 d28056202b - 06/2005 - eule-roboter.de
referenzanleitung val3 d28056202b - 06/2005 - eule-roboter.de
referenzanleitung val3 d28056202b - 06/2005 - eule-roboter.de

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
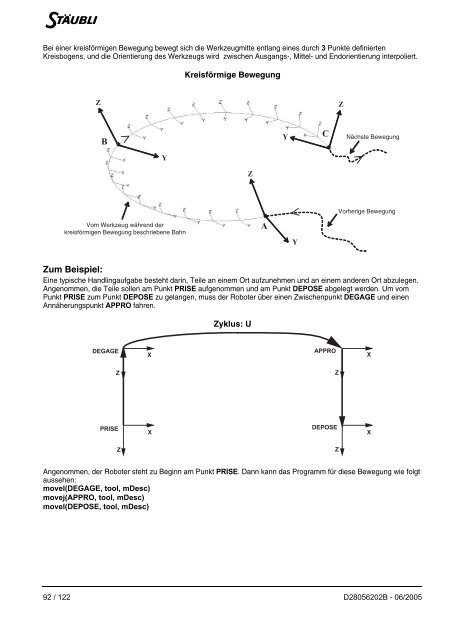
Bei einer kreisförmigen Bewegung bewegt sich die Werkzeugmitte entlang eines durch 3 Punkte <strong>de</strong>finierten<br />
Kreisbogens, und die Orientierung <strong>de</strong>s Werkzeugs wird zwischen Ausgangs-, Mittel- und Endorientierung interpoliert.<br />
Z<br />
Vom Werkzeug während <strong>de</strong>r<br />
kreisförmigen Bewegung beschriebene Bahn<br />
Kreisförmige Bewegung<br />
Zum Beispiel:<br />
Eine typische Handlingaufgabe besteht darin, Teile an einem Ort aufzunehmen und an einem an<strong>de</strong>ren Ort abzulegen.<br />
Angenommen, die Teile sollen am Punkt PRISE aufgenommen und am Punkt DEPOSE abgelegt wer<strong>de</strong>n. Um vom<br />
Punkt PRISE zum Punkt DEPOSE zu gelangen, muss <strong>de</strong>r Roboter über einen Zwischenpunkt DEGAGE und einen<br />
Annäherungspunkt APPRO fahren.<br />
DEGAGE<br />
Z<br />
PRISE<br />
Z<br />
X<br />
X<br />
Zyklus: U<br />
APPRO<br />
DEPOSE<br />
Nächste Bewegung<br />
Vorherige Bewegung<br />
Angenommen, <strong>de</strong>r Roboter steht zu Beginn am Punkt PRISE. Dann kann das Programm für diese Bewegung wie folgt<br />
aussehen:<br />
movel(DEGAGE, tool, mDesc)<br />
movej(APPRO, tool, mDesc)<br />
movel(DEPOSE, tool, mDesc)<br />
92 / 122 D28056202B - <strong>06</strong>/<strong>2005</strong><br />
Z<br />
Z<br />
X<br />
X













