

referenzanleitung val3 d28056202b - 06/2005 - eule-roboter.de
referenzanleitung val3 d28056202b - 06/2005 - eule-roboter.de
referenzanleitung val3 d28056202b - 06/2005 - eule-roboter.de

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
TYP POINT<br />
Definition<br />
Der Typ point dient zur Definition <strong>de</strong>r Position und Orientierung <strong>de</strong>s Roboterwerkzeugs in <strong>de</strong>r Arbeitszelle.<br />
Der Typ point ist ein strukturierter Typ mit folgen<strong>de</strong>n Fel<strong>de</strong>rn in <strong>de</strong>r nachstehen<strong>de</strong>n Reihenfolge:<br />
trsf trsf Position <strong>de</strong>s Punktes in seinem Referenz-Koordinatensystem<br />
config config Konfiguration <strong>de</strong>s Arms, um die Position anfahren zu können<br />
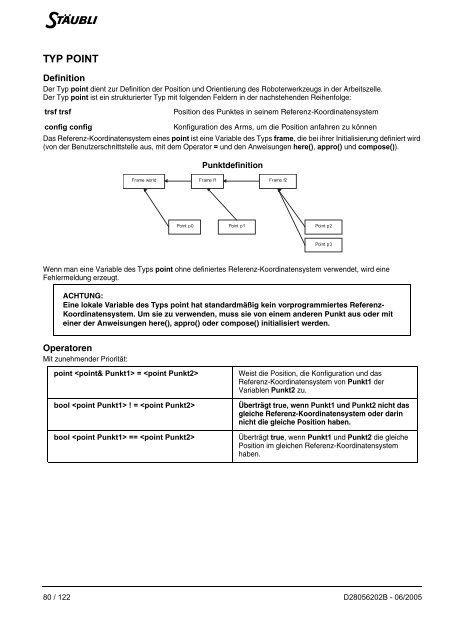
Das Referenz-Koordinatensystem eines point ist eine Variable <strong>de</strong>s Typs frame, die bei ihrer Initialisierung <strong>de</strong>finiert wird<br />
(von <strong>de</strong>r Benutzerschnittstelle aus, mit <strong>de</strong>m Operator = und <strong>de</strong>n Anweisungen here(), appro() und compose()).<br />
Punkt<strong>de</strong>finition<br />
Wenn man eine Variable <strong>de</strong>s Typs point ohne <strong>de</strong>finiertes Referenz-Koordinatensystem verwen<strong>de</strong>t, wird eine<br />
Fehlermeldung erzeugt.<br />
Operatoren<br />
Mit zunehmen<strong>de</strong>r Priorität:<br />
Frame world Frame f1<br />
Point p0<br />
Point p1<br />
ACHTUNG:<br />
Eine lokale Variable <strong>de</strong>s Typs point hat standardmäßig kein vorprogrammiertes Referenz-<br />
Koordinatensystem. Um sie zu verwen<strong>de</strong>n, muss sie von einem an<strong>de</strong>ren Punkt aus o<strong>de</strong>r mit<br />
einer <strong>de</strong>r Anweisungen here(), appro() o<strong>de</strong>r compose() initialisiert wer<strong>de</strong>n.<br />
point = Weist die Position, die Konfiguration und das<br />
Referenz-Koordinatensystem von Punkt1 <strong>de</strong>r<br />
Variablen Punkt2 zu.<br />
bool ! = Überträgt true, wenn Punkt1 und Punkt2 nicht das<br />
gleiche Referenz-Koordinatensystem o<strong>de</strong>r darin<br />
nicht die gleiche Position haben.<br />
bool == Überträgt true, wenn Punkt1 und Punkt2 die gleiche<br />
Position im gleichen Referenz-Koordinatensystem<br />
haben.<br />
80 / 122 D28056202B - <strong>06</strong>/<strong>2005</strong><br />
Frame f2<br />
Point p2<br />
Point p3













