

referenzanleitung val3 d28056202b - 06/2005 - eule-roboter.de
referenzanleitung val3 d28056202b - 06/2005 - eule-roboter.de
referenzanleitung val3 d28056202b - 06/2005 - eule-roboter.de

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
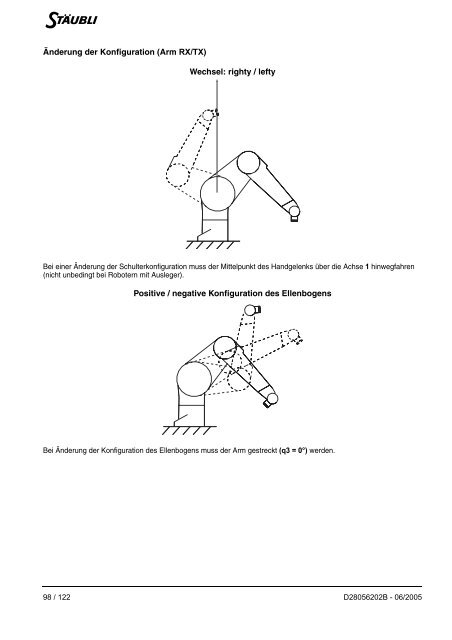
Än<strong>de</strong>rung <strong>de</strong>r Konfiguration (Arm RX/TX)<br />
Wechsel: righty / lefty<br />
Bei einer Än<strong>de</strong>rung <strong>de</strong>r Schulterkonfiguration muss <strong>de</strong>r Mittelpunkt <strong>de</strong>s Handgelenks über die Achse 1 hinwegfahren<br />
(nicht unbedingt bei Robotern mit Ausleger).<br />
Positive / negative Konfiguration <strong>de</strong>s Ellenbogens<br />
Bei Än<strong>de</strong>rung <strong>de</strong>r Konfiguration <strong>de</strong>s Ellenbogens muss <strong>de</strong>r Arm gestreckt (q3 = 0°) wer<strong>de</strong>n.<br />
98 / 122 D28056202B - <strong>06</strong>/<strong>2005</strong>













