antriebstechnikk 3/2016
antriebstechnik 3/2016
antriebstechnik 3/2016
- TAGS
- antriebstechnik

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
MEHRMOTORENANTRIEBSSYSTEME<br />
Das am häufigsten geforderte Optimalitätskriterium wird jedoch<br />
die Kombination aus hoher Energieeffizienz und geringen Lebenszykluskosten<br />
sein. Geringe Lebenszykluskosten können bereits<br />
durch die gezielte Freiheitsgradnutzung in der Konzeptionsphase<br />
begünstigt werden. Durch eine entsprechend strukturierte MMDS-<br />
Baureihe mit einem hohen Gleichteilegrad kann sichergestellt<br />
werden, dass ein Antriebssystem kundenseitig minimale Kosten<br />
im Ersatzteilmanagement bei gleichzeitig maximaler Verfügbarkeit<br />
erzielt. Darüber hinaus können durch viele Gleichteile über alle<br />
Varianten der Baureihe hinweg Arbeitsschritte in der Montage und<br />
Inbetriebnahme vereinfacht und standardisiert werden.<br />
Die gezielte Nutzung der Freiheitsgrade während des Betriebs<br />
des MMDS kann darüber hinaus zu geringen Lebenszykluskosten<br />
beitragen. Insbesondere lässt sich durch die drei Freiheitsgrade<br />
Drehmomentverteilung, elektrische und mechanische Rekonfigurierbarkeit<br />
die Energieeffizienz beeinflussen.<br />
Der Wirkungsgrad jeder Komponente eines Antriebssystems und<br />
folglich der Wirkungsgrad des Gesamtsystems ist eine Funktion des<br />
Arbeitspunktes und der Komponentenauslastung. Den größten<br />
Einfluss auf die Energieeffizienz des Gesamtsystems werden die<br />
Wirkungsgrade der Motoren haben, welche sich teilweise signifikant<br />
in Abhängigkeit der Maschinenauslastung ändern können<br />
[Fis06]. Während bei einem SMDS die Motorauslastung direkt mit<br />
dem Arbeitsprozess-Arbeitspunkt verkoppelt ist, ist dieser Zusammenhang<br />
bei einem MMDS weitestgehend aufgebrochen. Durch<br />
eine gezielte asymmetrische Verteilung des Arbeitsprozessdrehmoments<br />
auf die unterschiedlichen Motoren kann für jeden Arbeitspunkt<br />
das unter den gegebenen Randbedingungen erreichbare<br />
globale Optimum des Gesamtsystemwirkungsgrads eingestellt<br />
werden. Darüber hinaus können einzelne Motoren temporär elektrisch<br />
abgeschaltet und Antriebsstränge temporär mechanisch<br />
entkoppelt werden, sofern der leistungsvariable Arbeitsprozess<br />
dies erlaubt. Durch diese Maßnahmen lassen sich weitere Verluste<br />
vermeiden und der Gesamtsystemwirkungsgrad positiv beeinflussen.<br />
Zu prüfen ist in diesem Kontext, ob durch die modularitätsbedingte<br />
Reduktion der Motorbaugröße oder durch die modularitätsbedingte<br />
Überdimensionierung mechanischer Komponenten<br />
Effizienzeinbußen gegenüber einer speziell auf den konkreten<br />
Anwendungsfall ausgelegten Individuallösung auftreten und ob<br />
diese durch Modularitätsvorteile kompensiert oder überkompensiert<br />
werden können.<br />
Die Betrachtung zeigt, dass die Freiheitsgrade eines MMDS<br />
von der Konzeptions- bis zu der Betriebsphase genutzt werden<br />
können, um einen erweiterten Anwendernutzen zu generieren.<br />
Insbesondere während des Betriebs können die Freiheitsgrade<br />
gezielt eingesetzt werden, um ein Maximum der Energieeffizienz<br />
zu erzielen. Im Umkehrschluss zeigt sie jedoch auch, dass wenn<br />
durch eine geeignete Nutzung ein Maximum erreicht werden<br />
kann, kann durch eine falsche Nutzung oder eine Nichtberücksichtigung<br />
der Freiheitsgrade ein Minimum und somit ein un erwünschtes<br />
Betriebsverhalten erzielt werden. Mit welchen Methoden eine gezielte<br />
Nutzung der Freiheitsgrade im Betrieb realisiert und unerwünschte<br />
Betriebszustände vermieden werden können, wird in den zwei<br />
nachfolgenden Beiträgen dieser Reihe anhand einer detaillierten<br />
Betrachtung der einzelnen Freiheitsgrade erläutert. Für diesen ersten<br />
Beitrag soll die allgemeine Formulierung des Grundgedankens der<br />
Freiheitsgradnutzung ausreichen.<br />
Anforderungen an<br />
ein Mehrmotorenantriebssystem<br />
Die vorausgegangenen Überlegungen haben gezeigt, dass ein<br />
MMDS über mehr Freiheitsgrade verfügt als ein herkömmliches<br />
SMDS und dass diese gezielt genutzt werden müssen, um unerwünschte<br />
Betriebszustände zu vermeiden und einen zusätzlichen<br />
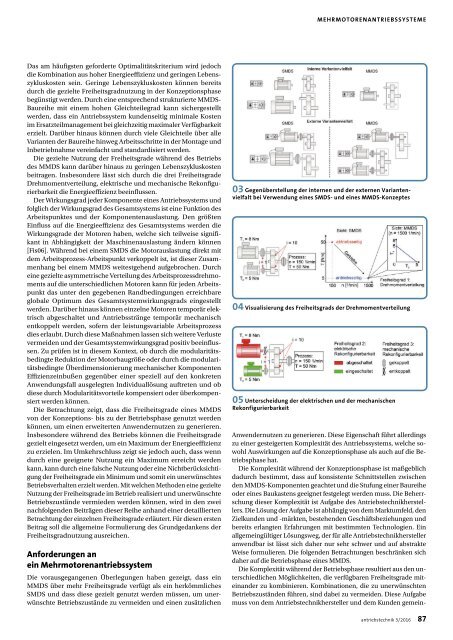
03 Gegenüberstellung der internen und der externen Variantenvielfalt<br />
bei Verwendung eines SMDS- und eines MMDS-Konzeptes<br />
04 Visualisierung des Freiheitsgrads der Drehmomentverteilung<br />
05 Unterscheidung der elektrischen und der mechanischen<br />
Rekonfigurierbarkeit<br />
Anwendernutzen zu generieren. Diese Eigenschaft führt allerdings<br />
zu einer gesteigerten Komplexität des Antriebssystems, welche sowohl<br />
Auswirkungen auf die Konzeptionsphase als auch auf die Betriebsphase<br />
hat.<br />
Die Komplexität während der Konzeptionsphase ist maßgeblich<br />
dadurch bestimmt, dass auf konsistente Schnittstellen zwischen<br />
den MMDS-Komponenten geachtet und die Stufung einer Baureihe<br />
oder eines Baukastens geeignet festgelegt werden muss. Die Beherrschung<br />
dieser Komplexität ist Aufgabe des Antriebstechnikherstellers.<br />
Die Lösung der Aufgabe ist abhängig von dem Marktumfeld, den<br />
Zielkunden und -märkten, bestehenden Geschäftsbeziehungen und<br />
bereits erlangten Erfahrungen mit bestimmten Technologien. Ein<br />
allgemeingültiger Lösungsweg, der für alle Antriebstechnikhersteller<br />
anwendbar ist lässt sich daher nur sehr schwer und auf abstrakte<br />
Weise formulieren. Die folgenden Betrachtungen beschränken sich<br />
daher auf die Betriebsphase eines MMDS.<br />
Die Komplexität während der Betriebsphase resultiert aus den unterschiedlichen<br />
Möglichkeiten, die verfügbaren Freiheitsgrade miteinander<br />
zu kombinieren. Kombinationen, die zu unerwünschten<br />
Betriebszuständen führen, sind dabei zu vermeiden. Diese Aufgabe<br />
muss von dem Antriebstechnikhersteller und dem Kunden gemein-<br />
antriebstechnik 3/<strong>2016</strong> 87