

Adept Quattro s650H Robot
Adept Quattro s650H Robot User's Guide - Asimo.pl
Adept Quattro s650H Robot User's Guide - Asimo.pl
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Chapter 1 - Introduction<br />
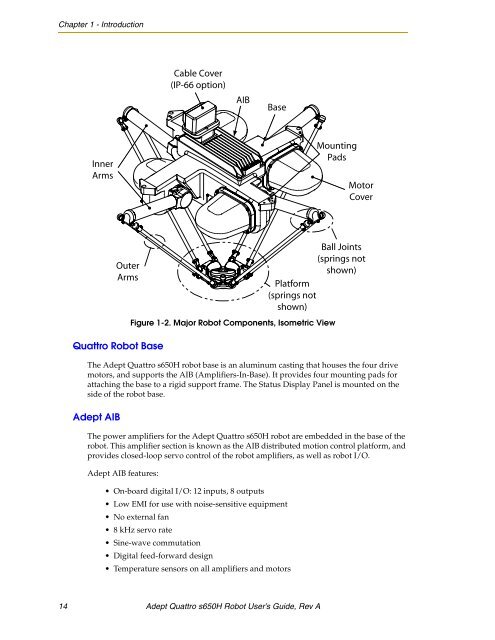
Cable Cover<br />
(IP-66 option)<br />
AIB<br />
Base<br />
Inner<br />
Arms<br />
Mounting<br />
Pads<br />
Motor<br />
Cover<br />
<strong>Quattro</strong> <strong>Robot</strong> Base<br />
Figure 1-2. Major <strong>Robot</strong> Components, Isometric View<br />
The <strong>Adept</strong> <strong>Quattro</strong> <strong>s650H</strong> robot base is an aluminum casting that houses the four drive<br />
motors, and supports the AIB (Amplifiers-In-Base). It provides four mounting pads for<br />
attaching the base to a rigid support frame. The Status Display Panel is mounted on the<br />
side of the robot base.<br />
<strong>Adept</strong> AIB<br />
Outer<br />
Arms<br />
The power amplifiers for the <strong>Adept</strong> <strong>Quattro</strong> <strong>s650H</strong> robot are embedded in the base of the<br />
robot. This amplifier section is known as the AIB distributed motion control platform, and<br />
provides closed-loop servo control of the robot amplifiers, as well as robot I/O.<br />
<strong>Adept</strong> AIB features:<br />
• On-board digital I/O: 12 inputs, 8 outputs<br />
• Low EMI for use with noise-sensitive equipment<br />
•No external fan<br />
• 8 kHz servo rate<br />
• Sine-wave commutation<br />
• Digital feed-forward design<br />
• Temperature sensors on all amplifiers and motors<br />
Ball Joints<br />
(springs not<br />
shown)<br />
Platform<br />
(springs not<br />
shown)<br />
14 <strong>Adept</strong> <strong>Quattro</strong> <strong>s650H</strong> <strong>Robot</strong> User’s Guide, Rev A













