

Adept Quattro s650H Robot
Adept Quattro s650H Robot User's Guide - Asimo.pl
Adept Quattro s650H Robot User's Guide - Asimo.pl
- No tags were found...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Chapter 5 - System Operation<br />
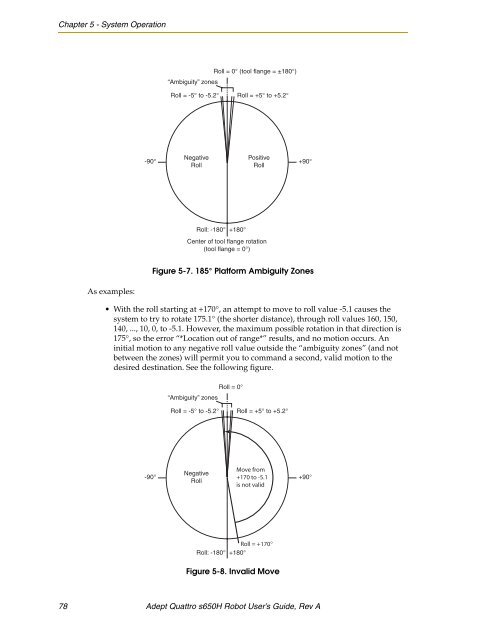
“Ambiguity” zones<br />
Roll = 0° (tool flange = ±180°)<br />
Roll = -5° to -5.2° Roll = +5° to +5.2°<br />
Negative<br />
Positive<br />
-90° +90°<br />
Roll<br />
Roll<br />
Roll: -180° +180°<br />
Center of tool flange rotation<br />
(tool flange = 0°)<br />
Figure 5-7. 185° Platform Ambiguity Zones<br />
As examples:<br />
• With the roll starting at +170°, an attempt to move to roll value -5.1 causes the<br />
system to try to rotate 175.1° (the shorter distance), through roll values 160, 150,<br />
140, ..., 10, 0, to -5.1. However, the maximum possible rotation in that direction is<br />
175°, so the error “*Location out of range*” results, and no motion occurs. An<br />
initial motion to any negative roll value outside the “ambiguity zones” (and not<br />
between the zones) will permit you to command a second, valid motion to the<br />
desired destination. See the following figure.<br />
“Ambiguity” zones<br />
Roll = 0°<br />
Roll = -5° to -5.2° Roll = +5° to +5.2°<br />
Move from<br />
Negative<br />
-90° +170 to -5.1 +90°<br />
Roll<br />
is not valid<br />
Roll: -180°<br />
Roll = +170°<br />
+180°<br />
Figure 5-8. Invalid Move<br />
78 <strong>Adept</strong> <strong>Quattro</strong> <strong>s650H</strong> <strong>Robot</strong> User’s Guide, Rev A













