

A. De Simone, "Posizionamento Doppler con osservabili GPS
A. De Simone, "Posizionamento Doppler con osservabili GPS
A. De Simone, "Posizionamento Doppler con osservabili GPS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Il posizionamento <strong>Doppler</strong> in Mode 2 ha lo scopo di studiare una situazione totalmente<br />
cinematica, in cui l‟andamento dell‟errore della posizione calcolata è in relazione sia <strong>con</strong> le<br />
velocità calcolate dal Blocco 1 che <strong>con</strong> le posizioni calcolate dal Blocco 2. L‟algoritmo è stato<br />
inzializzato <strong>con</strong> posizione stimata coincidente <strong>con</strong> la posizione vera e velocità stimata iniziale<br />
uguale a zero.<br />
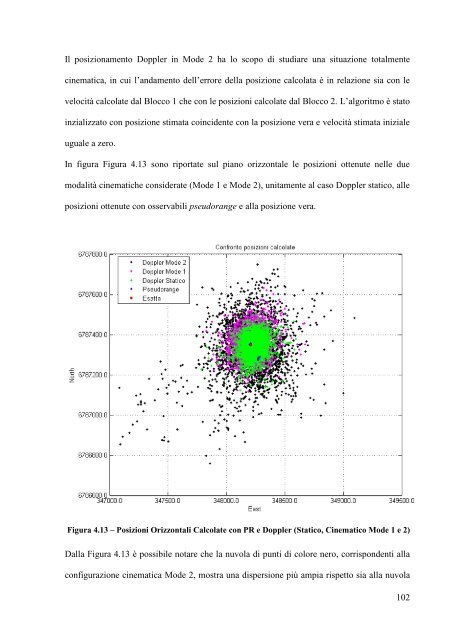
In figura Figura 4.13 sono riportate sul piano orizzontale le posizioni ottenute nelle due<br />
modalità cinematiche <strong>con</strong>siderate (Mode 1 e Mode 2), unitamente al caso <strong>Doppler</strong> statico, alle<br />
posizioni ottenute <strong>con</strong> <strong>osservabili</strong> pseudorange e alla posizione vera.<br />
Figura 4.13 – Posizioni Orizzontali Calcolate <strong>con</strong> PR e <strong>Doppler</strong> (Statico, Cinematico Mode 1 e 2)<br />
Dalla Figura 4.13 è possibile notare che la nuvola di punti di colore nero, corrispondenti alla<br />
<strong>con</strong>figurazione cinematica Mode 2, mostra una dispersione più ampia rispetto sia alla nuvola<br />
102













