

A. De Simone, "Posizionamento Doppler con osservabili GPS
A. De Simone, "Posizionamento Doppler con osservabili GPS
A. De Simone, "Posizionamento Doppler con osservabili GPS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
parametri noti <strong>con</strong> buona affidabilità, per cui in particolare va analizzata la dipendenza<br />
dell‟errore sul calcolo della velocità dall‟errore sulla posizione stimata.<br />
I dati utilizzati nel test sono stati raccolti da una stazione fissa di coordinate note. Le posizioni<br />
stimate poste in input sono un‟approssimazione via via più larga della posizione esatta<br />
(dell‟ordine rispettivamente delle decine, delle centinaia e delle migliaia di metri).<br />
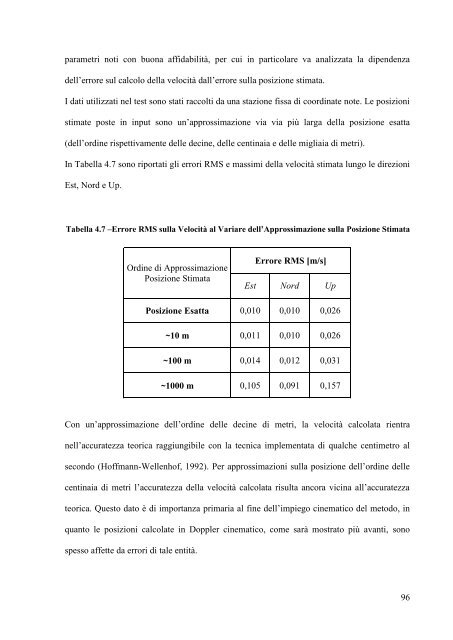
In Tabella 4.7 sono riportati gli errori RMS e massimi della velocità stimata lungo le direzioni<br />
Est, Nord e Up.<br />
Tabella 4.7 –Errore RMS sulla Velocità al Variare dell’Approssimazione sulla Posizione Stimata<br />
Ordine di Approssimazione<br />
Posizione Stimata<br />
Errore RMS [m/s]<br />
Est Nord Up<br />
Posizione Esatta 0,010 0,010 0,026<br />
~10 m 0,011 0,010 0,026<br />
~100 m 0,014 0,012 0,031<br />
~1000 m 0,105 0,091 0,157<br />
Con un‟approssimazione dell‟ordine delle decine di metri, la velocità calcolata rientra<br />
nell‟accuratezza teorica raggiungibile <strong>con</strong> la tecnica implementata di qualche centimetro al<br />
se<strong>con</strong>do (Hoffmann-Wellenhof, 1992). Per approssimazioni sulla posizione dell‟ordine delle<br />
centinaia di metri l‟accuratezza della velocità calcolata risulta ancora vicina all‟accuratezza<br />
teorica. Questo dato è di importanza primaria al fine dell‟impiego cinematico del metodo, in<br />
quanto le posizioni calcolate in <strong>Doppler</strong> cinematico, come sarà mostrato più avanti, sono<br />
spesso affette da errori di tale entità.<br />
96













