

A. De Simone, "Posizionamento Doppler con osservabili GPS
A. De Simone, "Posizionamento Doppler con osservabili GPS
A. De Simone, "Posizionamento Doppler con osservabili GPS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
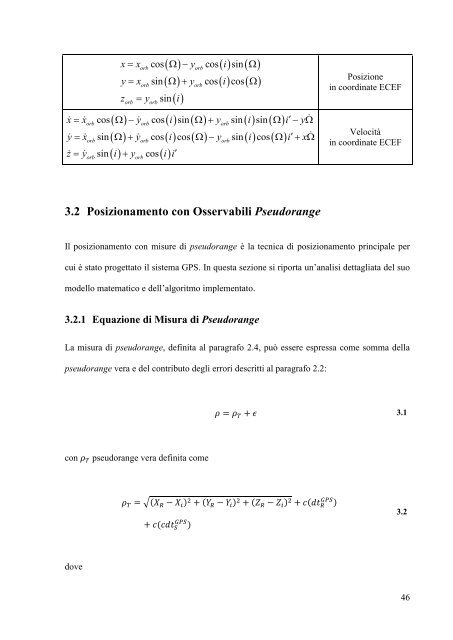
x x cos y cos i sin <br />
orb orb<br />
y x sin y cos i cos <br />
orb orb<br />
z y sin i<br />
orb orb<br />
<br />
<br />
<br />
x x cos y cos i sin y sin i sin i y<br />
orb orb orb<br />
y x sin y cos i cos y sin i cos i x<br />
orb orb orb<br />
z y sin i y cos i i<br />
orb orb<br />
3.2 <strong>Posizionamento</strong> <strong>con</strong> Osservabili Pseudorange<br />
Posizione<br />
in coordinate ECEF<br />
Velocità<br />
in coordinate ECEF<br />
Il posizionamento <strong>con</strong> misure di pseudorange è la tecnica di posizionamento principale per<br />
cui è stato progettato il sistema <strong>GPS</strong>. In questa sezione si riporta un‟analisi dettagliata del suo<br />
modello matematico e dell‟algoritmo implementato.<br />
3.2.1 Equazione di Misura di Pseudorange<br />
La misura di pseudorange, definita al paragrafo 2.4, può essere espressa come somma della<br />
pseudorange vera e del <strong>con</strong>tributo degli errori descritti al paragrafo 2.2:<br />
<strong>con</strong> pseudorange vera definita come<br />
dove<br />
3.1<br />
3.2<br />
46













