

A. De Simone, "Posizionamento Doppler con osservabili GPS
A. De Simone, "Posizionamento Doppler con osservabili GPS
A. De Simone, "Posizionamento Doppler con osservabili GPS

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
presenza, nel set di osservazioni disponibili, di un segnale ricevuto da un satellite molto<br />
basso, cui è associato una misura molto rumorosa (affetta da blunder). Nello specifico,<br />
intorno all‟epoca <strong>GPS</strong> 301600 sorge il satellite <strong>con</strong> indentificativo 31, mentre intorno<br />
all‟epoca 319000 il satellite 13 è in procinto di tramontare. Questi due casi isolati dimostrano<br />
la vulnerabilità dell‟osservabile pseudorange a interferenze, rumore o blunder, che possono<br />
risultare molto frequenti in ambienti ostili come i canyon urbani. Inoltre dalla Figura 4.5 si<br />
evince che l‟osservabile <strong>Doppler</strong> risulta più robusta rispetto a questo tipo di errori,<br />
avvalorandone l‟uso in supporto della pseudorange in ambienti critici.<br />
Va comunque precisato che la presenza di errori grossolani isolati può essere trattata <strong>con</strong><br />
opportuni algoritmi statistici di “blunder detection” (Petovello 2003).<br />
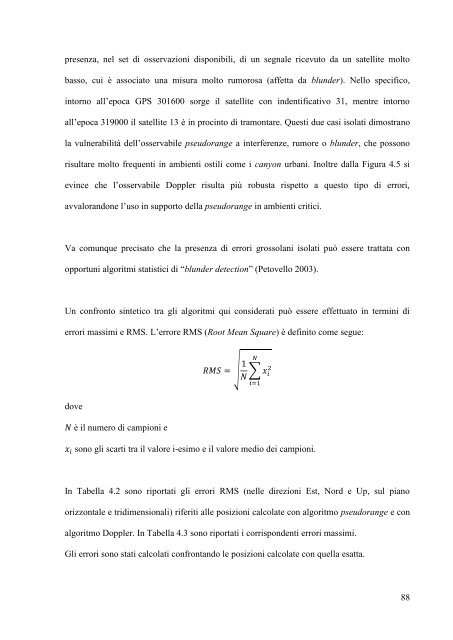
Un <strong>con</strong>fronto sintetico tra gli algoritmi qui <strong>con</strong>siderati può essere effettuato in termini di<br />
errori massimi e RMS. L‟errore RMS (Root Mean Square) è definito come segue:<br />
dove<br />
è il numero di campioni e<br />
sono gli scarti tra il valore i-esimo e il valore medio dei campioni.<br />
In Tabella 4.2 sono riportati gli errori RMS (nelle direzioni Est, Nord e Up, sul piano<br />
orizzontale e tridimensionali) riferiti alle posizioni calcolate <strong>con</strong> algoritmo pseudorange e <strong>con</strong><br />
algoritmo <strong>Doppler</strong>. In Tabella 4.3 sono riportati i corrispondenti errori massimi.<br />
Gli errori sono stati calcolati <strong>con</strong>frontando le posizioni calcolate <strong>con</strong> quella esatta.<br />
88













