

A. De Simone, "Posizionamento Doppler con osservabili GPS
A. De Simone, "Posizionamento Doppler con osservabili GPS
A. De Simone, "Posizionamento Doppler con osservabili GPS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Posizionamento</strong> assoluto o single point positioning, in cui le coordinate di un vertice<br />
sono determinate rispetto al sistema di riferimento globale WGS84;<br />
<strong>Posizionamento</strong> relativo, in cui vengono calcolate le componenti del vettore base-line<br />
che unisce due vertici, riducendo notevolmente gli errori sistematici sulle misure<br />
effettuate dalle due stazioni;<br />
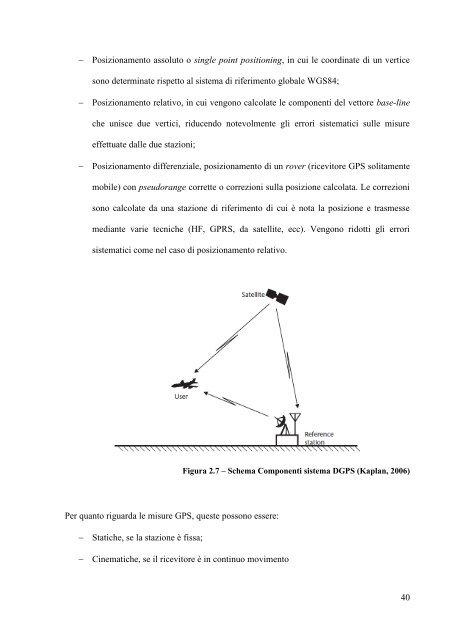
<strong>Posizionamento</strong> differenziale, posizionamento di un rover (ricevitore <strong>GPS</strong> solitamente<br />
mobile) <strong>con</strong> pseudorange corrette o correzioni sulla posizione calcolata. Le correzioni<br />
sono calcolate da una stazione di riferimento di cui è nota la posizione e trasmesse<br />
mediante varie tecniche (HF, GPRS, da satellite, ecc). Vengono ridotti gli errori<br />
sistematici come nel caso di posizionamento relativo.<br />
Per quanto riguarda le misure <strong>GPS</strong>, queste possono essere:<br />
Statiche, se la stazione è fissa;<br />
Figura 2.7 – Schema Componenti sistema D<strong>GPS</strong> (Kaplan, 2006)<br />
Cinematiche, se il ricevitore è in <strong>con</strong>tinuo movimento<br />
40













