

A. De Simone, "Posizionamento Doppler con osservabili GPS
A. De Simone, "Posizionamento Doppler con osservabili GPS
A. De Simone, "Posizionamento Doppler con osservabili GPS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
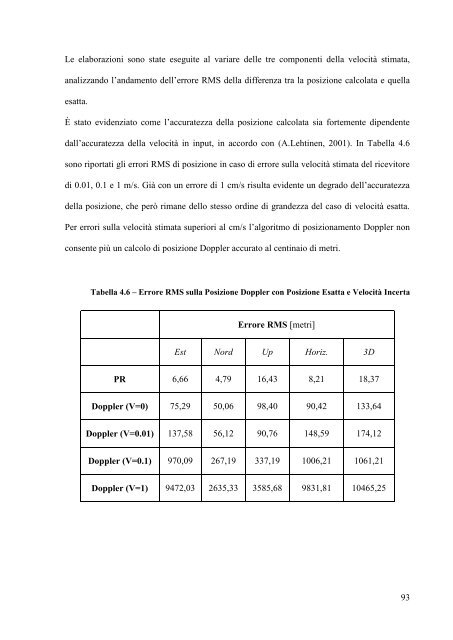
Le elaborazioni sono state eseguite al variare delle tre componenti della velocità stimata,<br />
analizzando l‟andamento dell‟errore RMS della differenza tra la posizione calcolata e quella<br />
esatta.<br />
È stato evidenziato come l‟accuratezza della posizione calcolata sia fortemente dipendente<br />
dall‟accuratezza della velocità in input, in accordo <strong>con</strong> (A.Lehtinen, 2001). In Tabella 4.6<br />
sono riportati gli errori RMS di posizione in caso di errore sulla velocità stimata del ricevitore<br />
di 0.01, 0.1 e 1 m/s. Già <strong>con</strong> un errore di 1 cm/s risulta evidente un degrado dell‟accuratezza<br />
della posizione, che però rimane dello stesso ordine di grandezza del caso di velocità esatta.<br />
Per errori sulla velocità stimata superiori al cm/s l‟algoritmo di posizionamento <strong>Doppler</strong> non<br />
<strong>con</strong>sente più un calcolo di posizione <strong>Doppler</strong> accurato al centinaio di metri.<br />
Tabella 4.6 – Errore RMS sulla Posizione <strong>Doppler</strong> <strong>con</strong> Posizione Esatta e Velocità Incerta<br />
Errore RMS [metri]<br />
Est Nord Up Horiz. 3D<br />
PR 6,66 4,79 16,43 8,21 18,37<br />
<strong>Doppler</strong> (V=0) 75,29 50,06 98,40 90,42 133,64<br />
<strong>Doppler</strong> (V=0.01) 137,58 56,12 90,76 148,59 174,12<br />
<strong>Doppler</strong> (V=0.1) 970,09 267,19 337,19 1006,21 1061,21<br />
<strong>Doppler</strong> (V=1) 9472,03 2635,33 3585,68 9831,81 10465,25<br />
93













