

A. De Simone, "Posizionamento Doppler con osservabili GPS
A. De Simone, "Posizionamento Doppler con osservabili GPS
A. De Simone, "Posizionamento Doppler con osservabili GPS

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
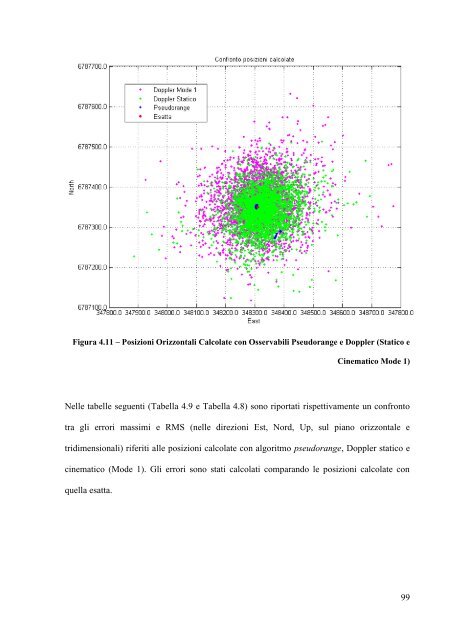
Figura 4.11 – Posizioni Orizzontali Calcolate <strong>con</strong> Osservabili Pseudorange e <strong>Doppler</strong> (Statico e<br />
Cinematico Mode 1)<br />
Nelle tabelle seguenti (Tabella 4.9 e Tabella 4.8) sono riportati rispettivamente un <strong>con</strong>fronto<br />
tra gli errori massimi e RMS (nelle direzioni Est, Nord, Up, sul piano orizzontale e<br />
tridimensionali) riferiti alle posizioni calcolate <strong>con</strong> algoritmo pseudorange, <strong>Doppler</strong> statico e<br />
cinematico (Mode 1). Gli errori sono stati calcolati comparando le posizioni calcolate <strong>con</strong><br />
quella esatta.<br />
99













