

"RegulÄÅ¡anas teorijas pamati, lekciju konspekts" (.pdf)
"RegulÄÅ¡anas teorijas pamati, lekciju konspekts" (.pdf)
"RegulÄÅ¡anas teorijas pamati, lekciju konspekts" (.pdf)

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
53<br />
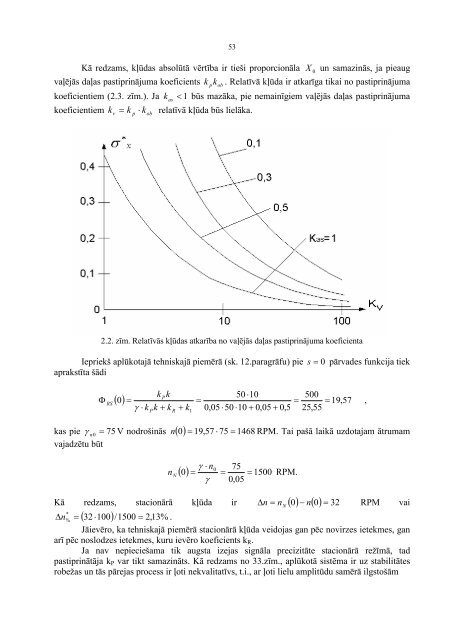
Kā redzams, kļūdas absolūtā vērtība ir tieši proporcionāla X<br />
0<br />
un samazinās, ja pieaug<br />
vaļējās daļas pastiprinājuma koeficients k k p ob<br />
. Relatīvā kļūda ir atkarīga tikai no pastiprinājuma<br />
koeficientiem (2.3. zīm.). Ja k < 1 būs mazāka, pie nemainīgiem vaļējās daļas pastiprinājuma<br />
koeficientiem<br />
v<br />
p<br />
ob<br />
as<br />
k = k × k relatīvā kļūda būs lielāka.<br />
2.2. zīm. Relatīvās kļūdas atkarība no vaļējās daļas pastiprinājuma koeficienta<br />
Iepriekš aplūkotajā tehniskajā piemērā (sk. 12.paragrāfu) pie s = 0 pārvades funkcija tiek<br />
aprakstīta šādi<br />
F<br />
RS<br />
k k<br />
k + k<br />
50 × 10<br />
0,05 × 50 × 10 + 0,05 + 0,5<br />
500<br />
25,55<br />
P<br />
( 0) =<br />
=<br />
= = 19, 57<br />
γ × k<br />
P<br />
R<br />
+ k<br />
1<br />
,<br />
γ V nodrošinās n( 0 ) = 19,57 × 75 = 1468<br />
kas pie = n0<br />
75<br />
vajadzētu būt<br />
γ × n0<br />
75<br />
n N<br />
( 0) = = = 1500 RPM.<br />
γ 0,05<br />
RPM. Tai pašā laikā uzdotajam ātrumam<br />
Kā redzams, stacionārā kļūda ir D = n ( 0 )-<br />
n( 0) = 32<br />
*<br />
Dn = ( 32 × 100) /1500 2,13%<br />
.<br />
%<br />
=<br />
n<br />
N<br />
RPM vai<br />
Jāievēro, ka tehniskajā piemērā stacionārā kļūda veidojas gan pēc novirzes ietekmes, gan<br />
arī pēc noslodzes ietekmes, kuru ievēro koeficients k R .<br />
Ja nav nepieciešama tik augsta izejas signāla precizitāte stacionārā režīmā, tad<br />
pastiprinātāja k P var tikt samazināts. Kā redzams no 33.zīm., aplūkotā sistēma ir uz stabilitātes<br />
robežas un tās pārejas process ir ļoti nekvalitatīvs, t.i., ar ļoti lielu amplitūdu samērā ilgstošām














