

"RegulÄÅ¡anas teorijas pamati, lekciju konspekts" (.pdf)
"RegulÄÅ¡anas teorijas pamati, lekciju konspekts" (.pdf)
"RegulÄÅ¡anas teorijas pamati, lekciju konspekts" (.pdf)

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
72<br />
2<br />
3<br />
10 -1,4ω<br />
+ j<br />
( )<br />
( 0,04ω<br />
-11,1<br />
ω )<br />
jω<br />
=<br />
2 2<br />
3<br />
( 1-<br />
0,14ω<br />
) + ( 1,1 ω - 0,004ω<br />
) 2<br />
W vc<br />
.<br />
Kā redzams, imaginārā daļa ir vienāda ar nulli, ja<br />
2<br />
0,04ω 11,1 .<br />
v0 =<br />
No šejienes ω = 16,<br />
v0<br />
66 1/sec. Ievietojot šo frekvenci reālās daļas izteiksmē, iegūstam<br />
U ( ω<br />
v0 ) = -0, 2641. Kā redzams, vaļējās cilpas amplitūdas pastiprinājums Gvc<br />
( ω<br />
v0)<br />
ir mazāks par<br />
vienu un RS ar šādu vaļējo cilpu būs stabila.<br />
Viss izklāstītais attiecas uz tā saucamo stabilo vaļējo cilpu KFR, t.i. tādām, kuru reālās<br />
daļas vērtība pie ω = 0 ir pozitīva, un kuru attēls,frekvencei augot, virzās pulksteņa rādītāja<br />
virzienā. Tādas KFR ir posmu ķēdēm,kuru pārvades funkcijas raksturvienādojumam nav<br />
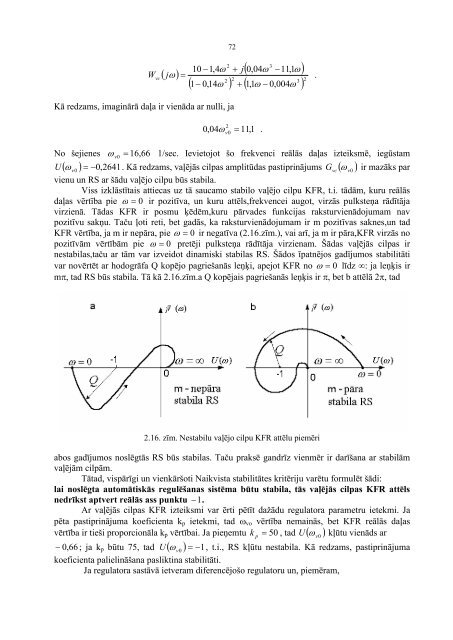
pozitīvu sakņu. Taču ļoti reti, bet gadās, ka raksturvienādojumam ir m pozitīvas saknes,un tad<br />
KFR vērtība, ja m ir nepāra, pie ω = 0 ir negatīva (2.16.zīm.), vai arī, ja m ir pāra,KFR virzās no<br />
pozitīvām vērtībām pie ω = 0 pretēji pulksteņa rādītāja virzienam. Šādas vaļējās cilpas ir<br />
nestabilas,taču ar tām var izveidot dinamiski stabilas RS. Šādos īpatnējos gadījumos stabilitāti<br />
var novērtēt ar hodogrāfa Q kopējo pagriešanās leņķi, apejot KFR no ω = 0 līdz ¥: ja leņķis ir<br />
mp, tad RS būs stabila. Tā kā 2.16.zīm.a Q kopējais pagriešanās leņķis ir p, bet b attēlā 2p, tad<br />
2.16. zīm. Nestabilu vaļējo cilpu KFR attēlu piemēri<br />
abos gadījumos noslēgtās RS būs stabilas. Taču praksē gandrīz vienmēr ir darīšana ar stabilām<br />
vaļējām cilpām.<br />
Tātad, vispārīgi un vienkāršoti Naikvista stabilitātes kritēriju varētu formulēt šādi:<br />
lai noslēgta automātiskās regulēšanas sistēma būtu stabila, tās vaļējās cilpas KFR attēls<br />
nedrīkst aptvert reālās ass punktu - 1.<br />
Ar vaļējās cilpas KFR izteiksmi var ērti pētīt dažādu regulatora parametru ietekmi. Ja<br />
pēta pastiprinājuma koeficienta k p ietekmi, tad w vo vērtība nemainās, bet KFR reālās daļas<br />
vērtība ir tieši proporcionāla k p vērtībai. Ja pieņemtu = 50 U ω kļūtu vienāds ar<br />
k , tad ( )<br />
- 0,66 ; ja k p būtu 75, tad U( ω<br />
v0) = -1, t.i., RS kļūtu nestabila. Kā redzams, pastiprinājuma<br />
koeficienta palielināšana pasliktina stabilitāti.<br />
Ja regulatora sastāvā ietveram diferencējošo regulatoru un, piemēram,<br />
p<br />
v0














