

"RegulÄÅ¡anas teorijas pamati, lekciju konspekts" (.pdf)
"RegulÄÅ¡anas teorijas pamati, lekciju konspekts" (.pdf)
"RegulÄÅ¡anas teorijas pamati, lekciju konspekts" (.pdf)

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
75<br />
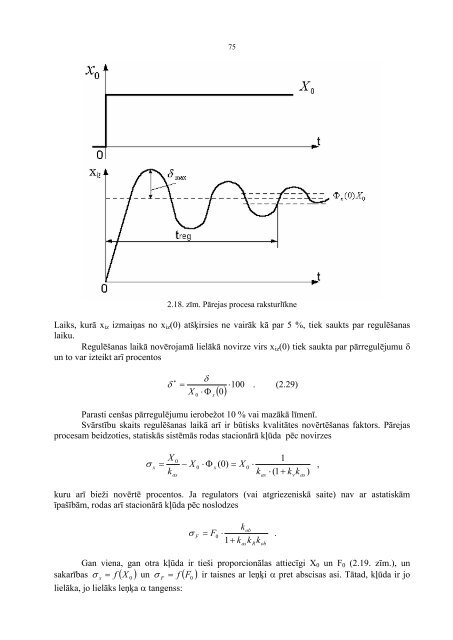
2.18. zīm. Pārejas procesa raksturlīkne<br />
Laiks, kurā x iz izmaiņas no x iz (0) atšķirsies ne vairāk kā par 5 %, tiek saukts par regulēšanas<br />
laiku.<br />
Regulēšanas laikā novērojamā lielākā novirze virs x iz (0) tiek saukta par pārregulējumu d<br />
un to var izteikt arī procentos<br />
* δ<br />
δ =<br />
. (2.29)<br />
X × F<br />
0<br />
x<br />
×<br />
( 0) 100<br />
Parasti cenšas pārregulējumu ierobežot 10 % vai mazākā līmenī.<br />
Svārstību skaits regulēšanas laikā arī ir būtisks kvalitātes novērtēšanas faktors. Pārejas<br />
procesam beidzoties, statiskās sistēmās rodas stacionārā kļūda pēc novirzes<br />
X<br />
0<br />
1<br />
σ<br />
x<br />
= - X<br />
0<br />
× F<br />
x<br />
( 0) = X<br />
0<br />
×<br />
,<br />
k<br />
k × (1 + k k )<br />
as<br />
kuru arī bieži novērtē procentos. Ja regulators (vai atgriezeniskā saite) nav ar astatiskām<br />
īpašībām, rodas arī stacionārā kļūda pēc noslodzes<br />
as<br />
v<br />
as<br />
ob<br />
σ<br />
F<br />
= F0<br />
×<br />
.<br />
1+<br />
kask<br />
Rkob<br />
k<br />
Gan viena, gan otra kļūda ir tieši proporcionālas attiecīgi X 0 un F 0 (2.19. zīm.), un<br />
f σ f ir taisnes ar leņķi a pret abscisas asi. Tātad, kļūda ir jo<br />
sakarības σ ( ) un ( )<br />
x =<br />
X 0<br />
F =<br />
lielāka, jo lielāks leņķa a tangenss:<br />
F 0














