

"RegulÄÅ¡anas teorijas pamati, lekciju konspekts" (.pdf)
"RegulÄÅ¡anas teorijas pamati, lekciju konspekts" (.pdf)
"RegulÄÅ¡anas teorijas pamati, lekciju konspekts" (.pdf)

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
61<br />
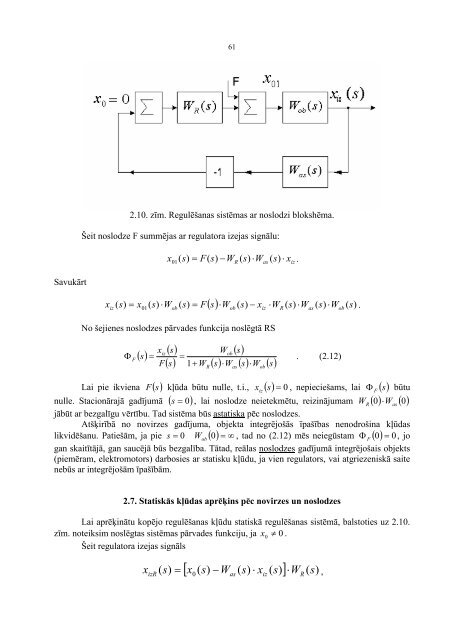
2.10. zīm. Regulēšanas sistēmas ar noslodzi blokshēma.<br />
Šeit noslodze F summējas ar regulatora izejas signālu:<br />
x ( s)<br />
= F(<br />
s)<br />
-W<br />
( s)<br />
× W ( s)<br />
× x<br />
01 R as iz .<br />
Savukārt<br />
x<br />
( s) × W ( s)<br />
- x × W ( s)<br />
× W ( s)<br />
W ( )<br />
( s)<br />
= x01(<br />
s)<br />
× W ( s)<br />
= F<br />
s .<br />
iz ob<br />
ob iz R as<br />
×<br />
No šejienes noslodzes pārvades funkcija noslēgtā RS<br />
ob<br />
F<br />
F<br />
() s<br />
=<br />
x<br />
iz<br />
F<br />
( s)<br />
() s<br />
=<br />
1+<br />
W<br />
R<br />
Wob<br />
( s)<br />
() s × W () s × W () s<br />
as<br />
ob<br />
. (2.12)<br />
Lai pie ikviena F ( s)<br />
kļūda būtu nulle, t.i., x iz<br />
( s) = 0 , nepieciešams, lai F<br />
F<br />
( s)<br />
būtu<br />
nulle. Stacionārajā gadījumā ( s = 0)<br />
, lai noslodze neietekmētu, reizinājumam W ( ) × W ( 0)<br />
R<br />
0<br />
as<br />
jābūt ar bezgalīgu vērtību. Tad sistēma būs astatiska pēc noslodzes.<br />
Atšķirībā no novirzes gadījuma, objekta integrējošās īpašības nenodrošina kļūdas<br />
likvidēšanu. Patiešām, ja pie s = 0 W<br />
ob<br />
( 0) = ¥ , tad no (2.12) mēs neiegūstam F F<br />
( 0 ) = 0, jo<br />
gan skaitītājā, gan saucējā būs bezgalība. Tātad, reālas noslodzes gadījumā integrējošais objekts<br />
(piemēram, elektromotors) darbosies ar statisku kļūdu, ja vien regulators, vai atgriezeniskā saite<br />
nebūs ar integrējošām īpašībām.<br />
2.7. Statiskās kļūdas aprēķins pēc novirzes un noslodzes<br />
Lai aprēķinātu kopējo regulēšanas kļūdu statiskā regulēšanas sistēmā, balstoties uz 2.10.<br />
zīm. noteiksim noslēgtas sistēmas pārvades funkciju, ja x ¹ 0<br />
0 .<br />
Šeit regulatora izejas signāls<br />
x<br />
[ x ( s)<br />
-W<br />
( s)<br />
× x ( s)<br />
] W ( )<br />
( s)<br />
0<br />
s<br />
= ,<br />
izR as iz<br />
×<br />
R














