Assisting the older driver - SWOV
Assisting the older driver - SWOV
Assisting the older driver - SWOV

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
<strong>Assisting</strong> <strong>the</strong> <strong>older</strong> <strong>driver</strong><br />
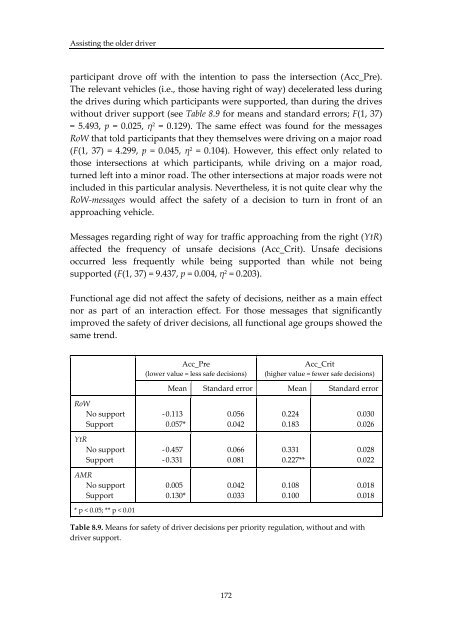
participant drove off with <strong>the</strong> intention to pass <strong>the</strong> intersection (Acc_Pre).<br />
The relevant vehicles (i.e., those having right of way) decelerated less during<br />
<strong>the</strong> drives during which participants were supported, than during <strong>the</strong> drives<br />
without <strong>driver</strong> support (see Table 8.9 for means and standard errors; F(1, 37)<br />
= 5.493, p = 0.025, η 2 = 0.129). The same effect was found for <strong>the</strong> messages<br />
RoW that told participants that <strong>the</strong>y <strong>the</strong>mselves were driving on a major road<br />
(F(1, 37) = 4.299, p = 0.045, η 2 = 0.104). However, this effect only related to<br />
those intersections at which participants, while driving on a major road,<br />
turned left into a minor road. The o<strong>the</strong>r intersections at major roads were not<br />
included in this particular analysis. Never<strong>the</strong>less, it is not quite clear why <strong>the</strong><br />
RoW‐messages would affect <strong>the</strong> safety of a decision to turn in front of an<br />
approaching vehicle.<br />
Messages regarding right of way for traffic approaching from <strong>the</strong> right (YtR)<br />
affected <strong>the</strong> frequency of unsafe decisions (Acc_Crit). Unsafe decisions<br />
occurred less frequently while being supported than while not being<br />
supported (F(1, 37) = 9.437, p = 0.004, η 2 = 0.203).<br />
Functional age did not affect <strong>the</strong> safety of decisions, nei<strong>the</strong>r as a main effect<br />
nor as part of an interaction effect. For those messages that significantly<br />
improved <strong>the</strong> safety of <strong>driver</strong> decisions, all functional age groups showed <strong>the</strong><br />
same trend.<br />
Acc_Pre<br />
(lower value = less safe decisions)<br />
Acc_Crit<br />
(higher value = fewer safe decisions)<br />
Mean Standard error Mean Standard error<br />
RoW<br />
No support<br />
Support<br />
‐ 0.113<br />
0.057*<br />
0.056<br />
0.042<br />
0.224<br />
0.183<br />
0.030<br />
0.026<br />
YtR<br />
No support<br />
Support<br />
‐ 0.457<br />
‐ 0.331<br />
0.066<br />
0.081<br />
0.331<br />
0.227**<br />
0.028<br />
0.022<br />
AMR<br />
No support<br />
Support<br />
0.005<br />
0.130*<br />
0.042<br />
0.033<br />
0.108<br />
0.100<br />
0.018<br />
0.018<br />
* p < 0.05; ** p < 0.01<br />
Table 8.9. Means for safety of <strong>driver</strong> decisions per priority regulation, without and with<br />
<strong>driver</strong> support.<br />
172