

Curs Mecanica
Curs Mecanica
Curs Mecanica

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
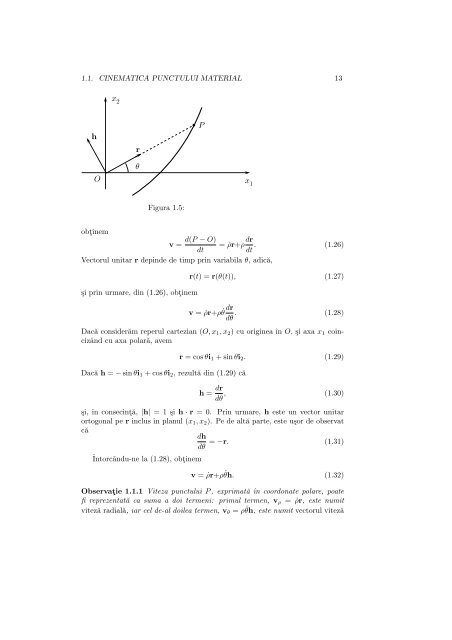
1.1. CINEMATICA PUNCTULUI MATERIAL 13<br />
h<br />
O<br />
x 2<br />
r<br />
θ<br />
Figura 1.5:<br />
P<br />
obt¸inem<br />
d(P − O)<br />
v = = ˙ρr+ρ<br />
dt<br />
dr<br />
. (1.26)<br />
dt<br />
Vectorul unitar r depinde de timp prin variabila θ, adică,<br />
¸si prin urmare, din (1.26), obt¸inem<br />
x 1<br />
r(t) = r(θ(t)), (1.27)<br />
v = ˙ρr+ρ ˙ θ dr<br />
. (1.28)<br />
dθ<br />
Dacă considerăm reperul cartezian (O, x1, x2) cu originea în O, ¸si axa x1 coincizând<br />
cu axa polară, avem<br />
Dacă h = − sin θi1 + cos θi2, rezultă din (1.29) că<br />
r = cos θi1 + sin θi2. (1.29)<br />
h = dr<br />
, (1.30)<br />
dθ<br />
¸si, în consecint¸ă, |h| = 1 ¸si h · r = 0. Prin urmare, h este un vector unitar<br />
ortogonal pe r inclus în planul (x1, x2). Pe de altă parte, este u¸sor de observat<br />
că<br />
dh<br />
= −r.<br />
dθ<br />
Întorcându-ne la (1.28), obt¸inem<br />
(1.31)<br />
v = ˙ρr+ρ ˙ θh. (1.32)<br />
Observat¸ie 1.1.1 Viteza punctului P , exprimată în coordonate polare, poate<br />
fi reprezentată ca suma a doi termeni: primul termen, vρ = ˙ρr, este numit<br />
viteză radială, iar cel de-al doilea termen, vθ = ρ ˙ θh, este numit vectorul viteză













