

Curs Mecanica
Curs Mecanica
Curs Mecanica

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
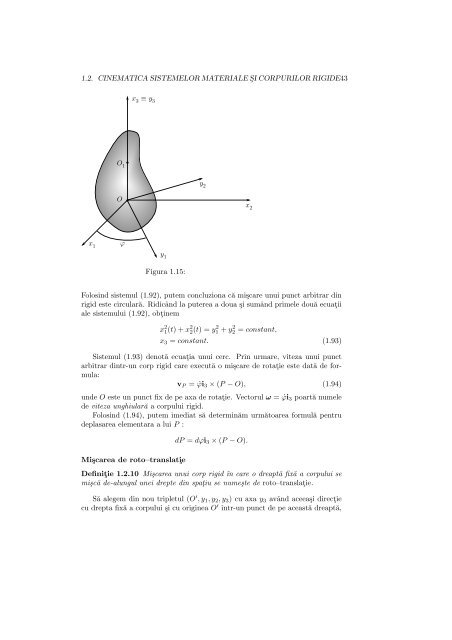
1.2. CINEMATICA SISTEMELOR MATERIALE S¸I CORPURILOR RIGIDE43<br />
x 1<br />
O 1<br />
O<br />
ϕ<br />
x 3 ≡ y 3<br />
y 1<br />
Figura 1.15:<br />
y 2<br />
Folosind sistemul (1.92), putem concluziona că mi¸scare unui punct arbitrar din<br />
rigid este circulară. Ridicând la puterea a doua ¸si sumând primele două ecuat¸ii<br />
ale sistemului (1.92), obt¸inem<br />
x 2<br />
x 2 1(t) + x 2 2(t) = y 2 1 + y 2 2 = constant,<br />
x3 = constant. (1.93)<br />
Sistemul (1.93) denotă ecuat¸ia unui cerc. Prin urmare, viteza unui punct<br />
arbitrar dintr-un corp rigid care execută o mi¸scare de rotat¸ie este dată de formula:<br />
vP = ˙ϕi3 × (P − O), (1.94)<br />
unde O este un punct fix de pe axa de rotat¸ie. Vectorul ω = ˙ϕi3 poartă numele<br />
de viteza unghiulară a corpului rigid.<br />
Folosind (1.94), putem imediat să determinăm următoarea formulă pentru<br />
deplasarea elementara a lui P :<br />
Mi¸scarea de roto–translatie ¸<br />
dP = dϕi3 × (P − O).<br />
Definit¸ie 1.2.10 Mi¸scarea unui corp rigid în care o dreaptă fixă a corpului se<br />
mi¸scă de-alungul unei drepte din spat¸iu se nume¸ste de roto–translat¸ie.<br />
Să alegem din nou tripletul (O ′ , y1, y2, y3) cu axa y3 având aceea¸si direct¸ie<br />
cu drepta fixă a corpului ¸si cu originea O ′ într-un punct de pe această dreaptă,













