

Curs Mecanica
Curs Mecanica
Curs Mecanica

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
42 CAPITOLUL 1. CINEMATICA<br />
x 2<br />
y 2<br />
A D<br />
B C<br />
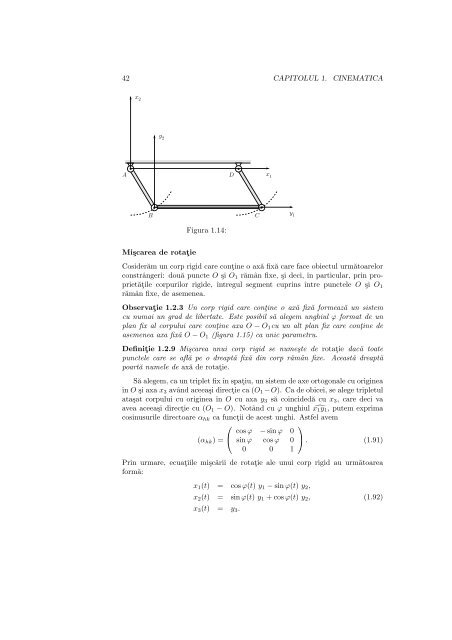
Mi¸scarea de rotat¸ie<br />
Figura 1.14:<br />
Cosiderăm un corp rigid care cont¸ine o axă fixă care face obiectul următoarelor<br />
constrângeri: două puncte O ¸si O1 rămân fixe, ¸si deci, în particular, prin proprietăt¸ile<br />
corpurilor rigide, întregul segment cuprins între punctele O ¸si O1<br />
rămân fixe, de asemenea.<br />
Observat¸ie 1.2.3 Un corp rigid care cont¸ine o axă fixă formează un sistem<br />
cu numai un grad de libertate. Este posibil să alegem unghiul ϕ format de un<br />
plan fix al corpului care cont¸ine axa O − O1cu un alt plan fix care cont¸ine de<br />
asemenea axa fixă O − O1 (figura 1.15) ca unic parametru.<br />
Definit¸ie 1.2.9 Mi¸scarea unui corp rigid se nume¸ste de rotat¸ie dacă toate<br />
punctele care se află pe o dreaptă fixă din corp rămân fixe. Această dreaptă<br />
poartă numele de axă de rotat¸ie.<br />
Să alegem, ca un triplet fix în spat¸iu, un sistem de axe ortogonale cu originea<br />
în O ¸si axa x3 având aceea¸si direct¸ie ca (O1 −O). Ca de obicei, se alege tripletul<br />
ata¸sat corpului cu originea în O cu axa y3 să coincidedă cu x3, care deci va<br />
avea aceea¸si direct¸ie cu (O1 − O). Notând cu ϕ unghiul x1y1, putem exprima<br />
cosinusurile directoare αhk ca funct¸ii de acest unghi. Astfel avem<br />
(αhk) =<br />
⎛<br />
⎝<br />
x 1<br />
y 1<br />
cos ϕ − sin ϕ 0<br />
sin ϕ cos ϕ 0<br />
0 0 1<br />
⎞<br />
⎠ . (1.91)<br />
Prin urmare, ecuat¸iile mi¸scării de rotat¸ie ale unui corp rigid au următoarea<br />
formă:<br />
x1(t) = cos ϕ(t) y1 − sin ϕ(t) y2,<br />
x2(t) = sin ϕ(t) y1 + cos ϕ(t) y2, (1.92)<br />
x3(t) = y3.













