

Curs Mecanica
Curs Mecanica
Curs Mecanica

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
1.2. CINEMATICA SISTEMELOR MATERIALE S¸I CORPURILOR RIGIDE65<br />
x 1<br />
y 3<br />
O<br />
x 3<br />
z 3<br />
O ′′<br />
z 1<br />
O ′<br />
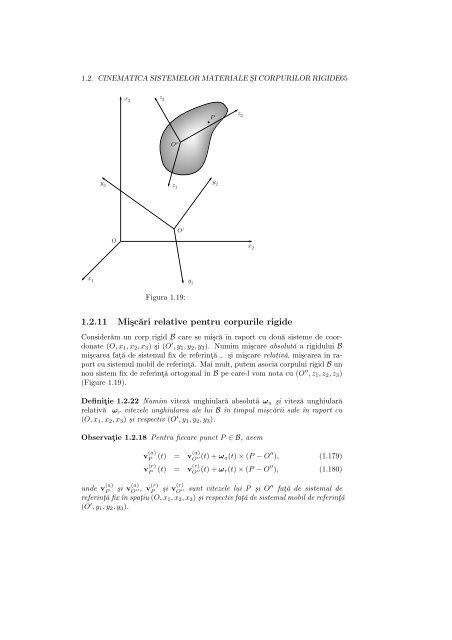
Figura 1.19:<br />
1.2.11 Mi¸scări relative pentru corpurile rigide<br />
y 1<br />
P<br />
Considerăm un corp rigid B care se mi¸scă în raport cu două sisteme de coordonate<br />
(O, x1, x2, x3) ¸si (O ′ , y1, y2, y3). Numim mi¸scare absolută a rigidului B<br />
mi¸scarea fat¸ă de sistemul fix de referint¸ă , ¸si mi¸scare relativă, mi¸scarea în raport<br />
cu sistemul mobil de referint¸ă. Mai mult, putem asocia corpului rigid B un<br />
nou sistem fix de referint¸ă ortogonal în B pe care-l vom nota cu (O ′′ , z1, z2, z3)<br />
(Figure 1.19).<br />
Definit¸ie 1.2.22 Numim viteză unghiulară absolută ωa ¸si viteză unghiulară<br />
relativă ωr vitezele unghiularea ale lui B în timpul mi¸scării sale în raport cu<br />
(O, x1, x2, x3) ¸si respectiv (O ′ , y1, y2, y3).<br />
Observat¸ie 1.2.18 Pentru fiecare punct P ∈ B, avem<br />
y 2<br />
z 2<br />
v (a)<br />
P (t) = v(a)<br />
O ′′(t) + ωa(t) × (P − O ′′ ), (1.179)<br />
v (r)<br />
P (t) = v(r)<br />
O ′′(t) + ωr(t) × (P − O ′′ ), (1.180)<br />
unde v (a)<br />
P ¸si v (a)<br />
O ′′, v(r)<br />
P ¸si v (r)<br />
O ′′ sunt vitezele lui P ¸si O′′ fat¸ă de sistemul de<br />
referint¸ă fix în spat¸iu (O, x1, x2, x3) ¸si respectiv fat¸ă de sistemul mobil de referint¸ă<br />
(O ′ , y1, y2, y3).<br />
x 2













