

Curs Mecanica
Curs Mecanica
Curs Mecanica

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
72 CAPITOLUL 1. CINEMATICA<br />
A<br />
O<br />
x 2<br />
B<br />
C<br />
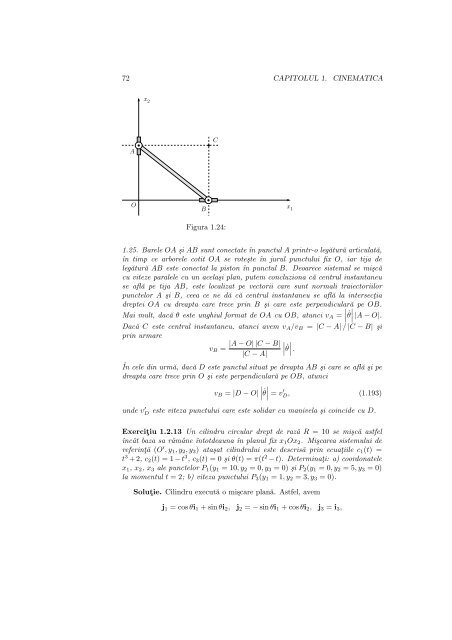
Figura 1.24:<br />
1.25. Barele OA ¸si AB sunt conectate în punctul A printr-o legătură articulată,<br />
în timp ce arborele cotit OA se rote¸ste în jurul punctului fix O, iar tija de<br />
legătură AB este conectat la piston în punctul B. Deoarece sistemul se mi¸scă<br />
cu viteze paralele cu un acela¸si plan, putem concluziona că centrul instantaneu<br />
se află pe tija AB, este localizat pe vectorii care sunt normali traiectoriilor<br />
punctelor A ¸si B, ceea ce ne dă că centrul instantaneu se află la intersect¸ia<br />
dreptei OA cu dreapta care trece prin B ¸si care este perpendiculară pe OB.<br />
<br />
Mai mult, dacă θ este unghiul format de OA cu OB, atunci vA = ˙ <br />
<br />
θ<br />
|A − O|.<br />
Dacă C este centrul instantaneu, atunci avem vA/vB = |C − A| / |C − B| ¸si<br />
prin urmare<br />
|A − O| |C − B|<br />
<br />
<br />
vB = <br />
|C − A|<br />
˙ <br />
<br />
θ<br />
.<br />
În cele din urmă, dacă D este punctul situat pe dreapta AB ¸si care se află ¸si pe<br />
dreapta care trece prin O ¸si este perpendiculară pe OB, atunci<br />
<br />
<br />
vB = |D − O| ˙ <br />
<br />
θ<br />
= v ′ D, (1.193)<br />
unde v ′ D<br />
este viteza punctului care este solidar cu manivela ¸si coincide cu D.<br />
Exercit¸iu 1.2.13 Un cilindru circular drept de rază R = 10 se mi¸scă astfel<br />
încât baza sa rămâne întotdeauna în planul fix x1Ox2. Mi¸scarea sistemului de<br />
referint¸ă (O ′ , y1, y2, y3) ata¸sat cilindrului este descrisă prin ecuat¸iile c1(t) =<br />
t 3 + 2, c2(t) = 1 − t 3 , c3(t) = 0 ¸si θ(t) = π(t 2 − t). Determinat¸i: a) coordonatele<br />
x1, x2, x3 ale punctelor P1(y1 = 10, y2 = 0, y3 = 0) ¸si P2(y1 = 0, y2 = 5, y3 = 0)<br />
la momentul t = 2; b) viteza punctului P3(y1 = 1, y2 = 3, y3 = 0).<br />
Solut¸ie. Cilindru execută o mi¸scare plană. Astfel, avem<br />
j1 = cos θi1 + sin θi2, j2 = − sin θi1 + cos θi2, j3 = i3,<br />
x 1













