Airborne Gravity 2010 - Geoscience Australia
Airborne Gravity 2010 - Geoscience Australia
Airborne Gravity 2010 - Geoscience Australia

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Airborne</strong> <strong>Gravity</strong> <strong>2010</strong><br />
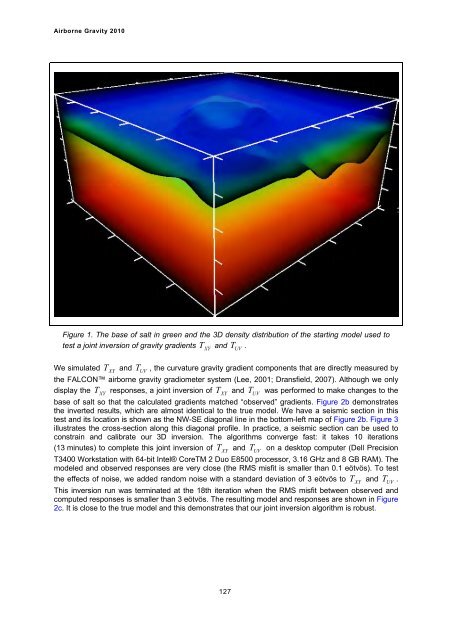
Figure 1. The base of salt in green and the 3D density distribution of the starting model used to<br />
test a joint inversion of gravity gradients T XY and T UV .<br />
We simulated T XY and T UV , the curvature gravity gradient components that are directly measured by<br />
the FALCON airborne gravity gradiometer system (Lee, 2001; Dransfield, 2007). Although we only<br />
display the T XY responses, a joint inversion of T XY and T UV was performed to make changes to the<br />
base of salt so that the calculated gradients matched “observed” gradients. Figure 2b demonstrates<br />
the inverted results, which are almost identical to the true model. We have a seismic section in this<br />
test and its location is shown as the NW-SE diagonal line in the bottom-left map of Figure 2b. Figure 3<br />
illustrates the cross-section along this diagonal profile. In practice, a seismic section can be used to<br />
constrain and calibrate our 3D inversion. The algorithms converge fast: it takes 10 iterations<br />
(13 minutes) to complete this joint inversion of T XY and T UV on a desktop computer (Dell Precision<br />
T3400 Workstation with 64-bit Intel® CoreTM 2 Duo E8500 processor, 3.16 GHz and 8 GB RAM). The<br />
modeled and observed responses are very close (the RMS misfit is smaller than 0.1 eötvös). To test<br />
the effects of noise, we added random noise with a standard deviation of 3 eötvös to T XY and T UV .<br />
This inversion run was terminated at the 18th iteration when the RMS misfit between observed and<br />
computed responses is smaller than 3 eötvös. The resulting model and responses are shown in Figure<br />
2c. It is close to the true model and this demonstrates that our joint inversion algorithm is robust.<br />
127