Airborne Gravity 2010 - Geoscience Australia
Airborne Gravity 2010 - Geoscience Australia
Airborne Gravity 2010 - Geoscience Australia

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Airborne</strong> <strong>Gravity</strong> <strong>2010</strong><br />
DEM resolution in terrain correction<br />
<strong>Airborne</strong> gravity gradiometry data are invariably low-pass filtered versions of the actual gradient fields<br />
because of the use of low-pass filters in the acquisition system and post-acquisition processing. The<br />
filtering is predominantly applied in the direction of the flight lines. The exact properties of the filters<br />
are often proprietary to the acquisition companies (Lane, 2004), and the exact parameters may not be<br />
supplied to the end user. Regardless, the effect of filtering of the data on the resolution requirements<br />
for terrain correction needs to be examined.<br />
We examine this aspect by processing a set of high resolution LiDAR data at different effective<br />
resolutions, both with and without a representative acquisition filter applied to the forward model Tzz<br />
component of the gravity gradient (Figure 4a).<br />
By comparing ground gravity data and airborne gravity gradient data, Lane (2004) showed that the<br />
remaining frequency content of gravity gradiometry data after filtering may be modelled by a simple<br />
Butterworth filter of varying cutoff wavenumber. For many currently available datasets, this filter cutoff<br />
is approximately 200 m. Although this does not specify the actual parameters that were used for the<br />
acquisition low-pass filter, it does provide a composite filter representation that encapsulates the<br />
cumulative filtering effect of the acquisition system and subsequent processing steps. We therefore<br />
used a 200 m length, fourth-order Butterworth filter applied along the “flight” direction (east-west) to<br />
simulate the acquisition filter (Figure 4b).<br />
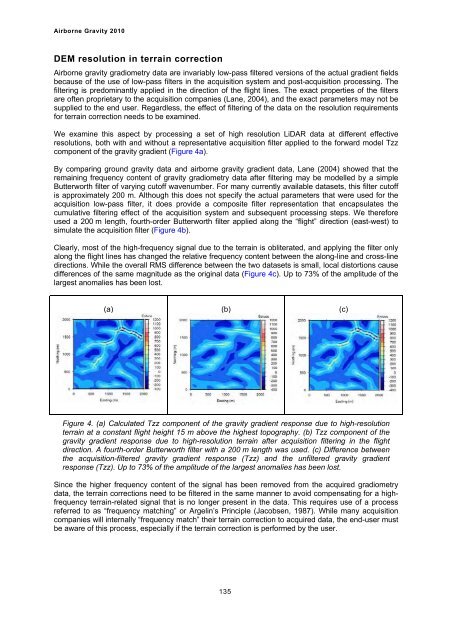
Clearly, most of the high-frequency signal due to the terrain is obliterated, and applying the filter only<br />
along the flight lines has changed the relative frequency content between the along-line and cross-line<br />
directions. While the overall RMS difference between the two datasets is small, local distortions cause<br />
differences of the same magnitude as the original data (Figure 4c). Up to 73% of the amplitude of the<br />
largest anomalies has been lost.<br />
(a)<br />
(b)<br />
Figure 4. (a) Calculated Tzz component of the gravity gradient response due to high-resolution<br />
terrain at a constant flight height 15 m above the highest topography. (b) Tzz component of the<br />
gravity gradient response due to high-resolution terrain after acquisition filtering in the flight<br />
direction. A fourth-order Butterworth filter with a 200 m length was used. (c) Difference between<br />
the acquisition-filtered gravity gradient response (Tzz) and the unfiltered gravity gradient<br />
response (Tzz). Up to 73% of the amplitude of the largest anomalies has been lost.<br />
Since the higher frequency content of the signal has been removed from the acquired gradiometry<br />
data, the terrain corrections need to be filtered in the same manner to avoid compensating for a highfrequency<br />
terrain-related signal that is no longer present in the data. This requires use of a process<br />
referred to as “frequency matching” or Argelin’s Principle (Jacobsen, 1987). While many acquisition<br />
companies will internally “frequency match” their terrain correction to acquired data, the end-user must<br />
be aware of this process, especially if the terrain correction is performed by the user.<br />
135<br />
(c)