Airborne Gravity 2010 - Geoscience Australia
Airborne Gravity 2010 - Geoscience Australia
Airborne Gravity 2010 - Geoscience Australia

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
<strong>Airborne</strong> <strong>Gravity</strong> <strong>2010</strong><br />
Because the line data do not sample the peak, the gridded values do not accurately reflect the true<br />
peak. In Figure 6, the two curves match at the line locations every 200 m but differ between them.<br />
When taken in 2 dimensions, these differences are what cause most of the problems. However, even<br />
if there are differences, does this make any difference to the interpretability of the data?<br />
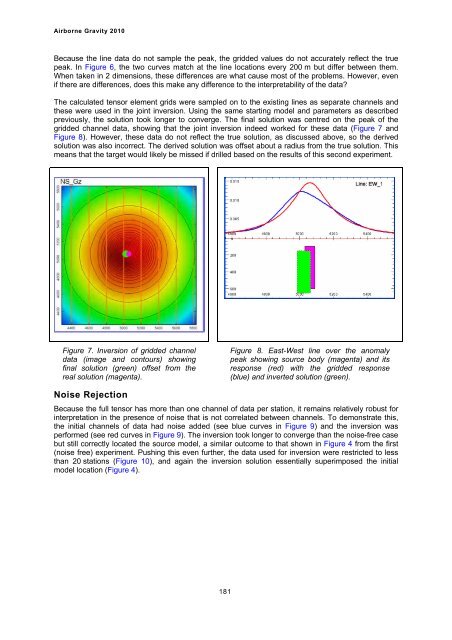
The calculated tensor element grids were sampled on to the existing lines as separate channels and<br />
these were used in the joint inversion. Using the same starting model and parameters as described<br />
previously, the solution took longer to converge. The final solution was centred on the peak of the<br />
gridded channel data, showing that the joint inversion indeed worked for these data (Figure 7 and<br />
Figure 8). However, these data do not reflect the true solution, as discussed above, so the derived<br />
solution was also incorrect. The derived solution was offset about a radius from the true solution. This<br />
means that the target would likely be missed if drilled based on the results of this second experiment.<br />
Figure 7. Inversion of gridded channel<br />
data (image and contours) showing<br />
final solution (green) offset from the<br />
real solution (magenta).<br />
Noise Rejection<br />
181<br />
Figure 8. East-West line over the anomaly<br />
peak showing source body (magenta) and its<br />
response (red) with the gridded response<br />
(blue) and inverted solution (green).<br />
Because the full tensor has more than one channel of data per station, it remains relatively robust for<br />
interpretation in the presence of noise that is not correlated between channels. To demonstrate this,<br />
the initial channels of data had noise added (see blue curves in Figure 9) and the inversion was<br />
performed (see red curves in Figure 9). The inversion took longer to converge than the noise-free case<br />
but still correctly located the source model, a similar outcome to that shown in Figure 4 from the first<br />
(noise free) experiment. Pushing this even further, the data used for inversion were restricted to less<br />
than 20 stations (Figure 10), and again the inversion solution essentially superimposed the initial<br />
model location (Figure 4).