

3D Time-of-flight distance measurement with custom - Universität ...
3D Time-of-flight distance measurement with custom - Universität ...
3D Time-of-flight distance measurement with custom - Universität ...

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
OPTICAL TOF RANGE MEASUREMENT 9<br />
2. Optical TOF range <strong>measurement</strong><br />
The basic principles <strong>of</strong> optical range <strong>measurement</strong> techniques (1) triangulation, (2)<br />
interferometry and (3) time-<strong>of</strong>-<strong>flight</strong> are introduced in this chapter. All these<br />
techniques mostly work <strong>with</strong> light, i.e. electromagnetic radiation fields in the<br />
wavelength range <strong>of</strong> 400-1000 nanometers (visible and NIR spectrum). We present<br />
a rough description <strong>of</strong> the basic working principles. The advantages and<br />
disadvantages <strong>of</strong> each principle are discussed and some examples are also given.<br />
More detailed and broader overviews over optical ranging principles can be found<br />
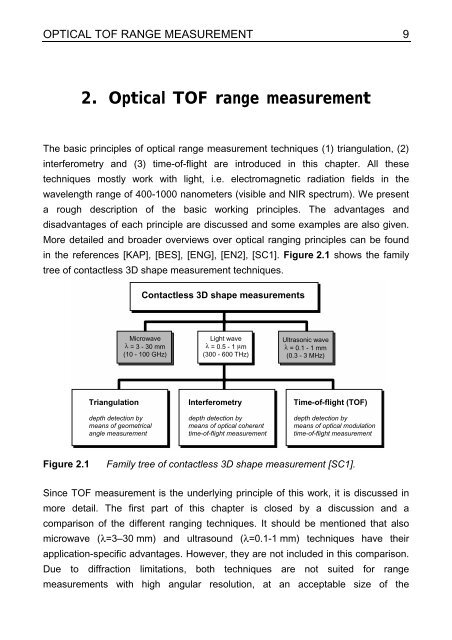
in the references [KAP], [BES], [ENG], [EN2], [SC1]. Figure 2.1 shows the family<br />
tree <strong>of</strong> contactless <strong>3D</strong> shape <strong>measurement</strong> techniques.<br />
Triangulation<br />
Contactless <strong>3D</strong> shape <strong>measurement</strong>s<br />
Microwave<br />
λ = 3 - 30 mm<br />
(10 - 100 GHz)<br />
depth detection by<br />
means <strong>of</strong> geometrical<br />
angle <strong>measurement</strong><br />
Light wave<br />
λ = 0.5 - 1 µm<br />
(300 - 600 THz)<br />
Interferometry<br />
depth detection by<br />
means <strong>of</strong> optical coherent<br />
time-<strong>of</strong>-<strong>flight</strong> <strong>measurement</strong><br />
Ultrasonic wave<br />
λ = 0.1 - 1 mm<br />
(0.3 - 3 MHz)<br />
<strong>Time</strong>-<strong>of</strong>-<strong>flight</strong> (TOF)<br />
depth detection by<br />
means <strong>of</strong> optical modulation<br />
time-<strong>of</strong>-<strong>flight</strong> <strong>measurement</strong><br />
Figure 2.1 Family tree <strong>of</strong> contactless <strong>3D</strong> shape <strong>measurement</strong> [SC1].<br />
Since TOF <strong>measurement</strong> is the underlying principle <strong>of</strong> this work, it is discussed in<br />
more detail. The first part <strong>of</strong> this chapter is closed by a discussion and a<br />
comparison <strong>of</strong> the different ranging techniques. It should be mentioned that also<br />
microwave (λ=3–30 mm) and ultrasound (λ=0.1-1 mm) techniques have their<br />
application-specific advantages. However, they are not included in this comparison.<br />
Due to diffraction limitations, both techniques are not suited for range<br />
<strong>measurement</strong>s <strong>with</strong> high angular resolution, at an acceptable size <strong>of</strong> the














