- Page 1 and 2:
BỘ GIÁO DỤC VÀ ĐÀO TẠO B
- Page 3 and 4:
LỜI CAM ĐOAN Tôi xin cam đoan
- Page 5 and 6:
2.1.2. Tiêu chuẩn loại trừ .
- Page 7 and 8:
DANH MỤC CÁC CHỮ VIẾT TẮT
- Page 9 and 10:
DANH MỤC CÁC BẢNG Trang Bảng
- Page 11 and 12:
DANH MỤC CÁC BIỂU ĐỒ Trang
- Page 13 and 14:
Hình 1.18. Hình đại thể dị
- Page 15 and 16:
1 ĐẶT VẤN ĐỀ Ngày nay, tr
- Page 17 and 18:
3 Chƣơng 1. TỔNG QUAN TÀI LI
- Page 19 and 20:
5 - Đoạn C4: đoạn qua khỏi
- Page 21 and 22:
7 1.1.2.5. Động mạch đốt s
- Page 23 and 24:
9 ĐM MM trƣớc Móc hồi hải
- Page 25 and 26:
11 Hợp lƣu tĩnh mạch xoang: H
- Page 27 and 28:
13 - Xoang xích ma liên tiếp v
- Page 29 and 30:
15 1.2.1.2. Bệnh học và sinh l
- Page 31 and 32:
17 1.2.1.5. Điều trị Các thư
- Page 33 and 34:
19 Những y văn chủ yếu đề
- Page 35 and 36:
21 phẫu thuật cũng tương đ
- Page 37 and 38:
23 hiệu tăng tín hiệu đa d
- Page 39 and 40:
25 1.2.4.2. Giải phẫu bệnh v
- Page 41 and 42:
27 Những yếu tố khác đượ
- Page 43 and 44:
29 Hình 1.21. Phân độ (grade)
- Page 45 and 46:
31 Nhược điểm: Nhược đi
- Page 47 and 48:
33 thời điểm lấy máu tụ.
- Page 49 and 50:
35 cũng phải để lại điều
- Page 51 and 52:
37 1.2.5. Điều trị dị dạng
- Page 53 and 54:
39 Stereoenchephalotomy ở Tokyo n
- Page 55 and 56:
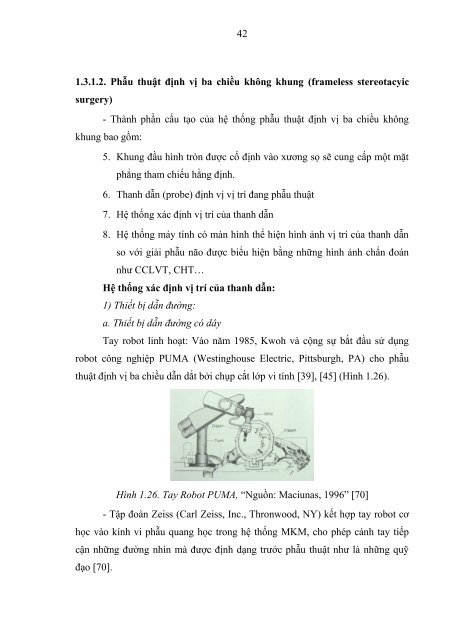
41 Hình 1.25. Khung Leksell. “Ng
- Page 57 and 58:
43 Cánh tay định vị bị đ
- Page 59 and 60:
45 được nhìn từ 2 góc độ
- Page 61 and 62:
47 Hình 1.30. Hệ thống NeuroSt
- Page 63 and 64:
49 Vị trí định vị dựa tr
- Page 65 and 66:
51 những hình ảnh ba chiều g
- Page 67 and 68:
53 - Phương pháp đánh dấu ng
- Page 69 and 70:
55 lợi ích trong việc chẩn
- Page 71 and 72:
57 Z (1 / 2) n Z 2 (1 / 2) Trong
- Page 73 and 74:
59 1) Máu tụ trong nhu mô não.
- Page 75 and 76:
61 Bảng 2.1. Phân độ Spetzler
- Page 77 and 78:
63 Trang thiết bị phẫu thuậ
- Page 79 and 80:
65 Hình 2.3. Tái tạo hình ản
- Page 81 and 82:
67 Hình 2.7. Bóc tách bộc lộ
- Page 83 and 84:
69 2.2.10. Đánh giá kết quả
- Page 85 and 86:
71 2.3. Xử lý số liệu Số l
- Page 87 and 88:
73 3.1.3. Thang điểm Glasgow (GC
- Page 89 and 90:
75 3.2. Đặc điểm hình ảnh
- Page 91 and 92:
77 3.2.5. Tƣơng quan nhóm tuổi
- Page 93 and 94:
79 3.2.9. Phân độ Spetzler-Mart
- Page 95 and 96:
81 3.2.13. Động mạch nuôi DD
- Page 97 and 98:
83 3.2.15. Tĩnh mạch dẫn lƣu:
- Page 99 and 100:
85 3.3.4. Sự liên quan phân đ
- Page 101 and 102:
87 3.4.2. Sự liên quan giữa ph
- Page 103 and 104:
89 Các bệnh nhân sau mổ đư
- Page 105 and 106:
91 Chƣơng 4. BÀN LUẬN 4.1. Đ
- Page 107 and 108:
93 mạch, 70% có thể phát tri
- Page 109 and 110:
95 biệt giữa GOS của bệnh n
- Page 111 and 112:
97 năng sinh hoạt độc lập.
- Page 113 and 114:
99 Kích thước DDĐTMN có phả
- Page 115 and 116:
101 và não sau (1 trường hợp
- Page 117 and 118:
103 Một tĩnh mạch dẫn lưu l
- Page 119 and 120:
105 quan đến lưu lượng hoặ
- Page 121 and 122:
107 4.3. Điều trị phẫu thu
- Page 123 and 124:
109 thuật như: DDĐTM phối h
- Page 125 and 126:
111 Những tổn thương này có
- Page 127 and 128:
113 Trước mổ Sau mổ Hình 4.
- Page 129 and 130:
115 Trước mổ Sau mổ Hình 4.
- Page 131 and 132:
117 Du Rose [29] phẫu thuật 43
- Page 133 and 134:
119 cạnh đường giữa qua ti
- Page 135 and 136:
121 nhận thức được nguy cơ
- Page 137 and 138:
123 4.4. Đánh giá kết quả ph
- Page 139 and 140:
125 Bảng 4.9. So sánh kết qu
- Page 141 and 142:
127 4.4.4. Biến chứng xuất hu
- Page 143 and 144:
129 Trong nhóm nghiên cứu, chú
- Page 145 and 146:
131 KẾT LUẬN Qua phân tích 62
- Page 147 and 148:
133 gian phẫu thuật ngắn hơn
- Page 149 and 150:
DANH MỤC CÁC CÔNG TRÌNH NGHIÊ
- Page 151 and 152:
9. Trương Văn Việt, Dương Mi
- Page 153 and 154:
25. Christer Lindquist; Wan-Yio Guo
- Page 155 and 156:
40. Gemano, Isabelle M. (1995). “
- Page 157 and 158:
57. Janet L. W., Edward F. (1996).
- Page 159 and 160:
74. McLaughlin, Mark R.; Kondziolka
- Page 161 and 162:
91. Patterson J.H., McKissock W.A.
- Page 163 and 164:
107. Shekhar, N Laligam, 2006. “A
- Page 165 and 166: with clinical presentation of hemor
- Page 167 and 168: BỆNH ÁN MINH HỌA BỆNH ÁN 1:
- Page 169 and 170: BỆNH ÁN 2: Bệnh nhân viêm m
- Page 171 and 172: MẪU BỆNH ÁN BỆNH NHÂN DỊ
- Page 173 and 174: 6) Giảm thị lực: Phải, Có
- Page 175 and 176: VIII. XUẤT VIỆN: - GOS khi xu
- Page 177 and 178: 2 và những thành phần mạch
- Page 179 and 180: 4 - Tuần thứ 7-9: Hoàn thiện
- Page 181 and 182: 6 khe giữa hai bán cầu, uốn
- Page 183 and 184: 8 Các nhánh - Các động mạch
- Page 185 and 186: 10 Đa giác Willis là vòng mạc
- Page 187 and 188: 12 mạch nền. Ngoài ra tĩnh m
- Page 189 and 190: 14 Ngoài ra còn đám rồi tĩnh
- Page 191 and 192: 16 huyết khá hiếm. Hiếm có
- Page 193 and 194: 18 Hình 1.11. Hình dị dạng t
- Page 195 and 196: 20 Trên CCLVT đặc điểm phổ
- Page 197 and 198: 22 hoặc là cơ trơn. Đặc đi
- Page 199 and 200: 24 vực khó có thể tiếp cậ
- Page 201 and 202: 26 của những động mạch nu
- Page 203 and 204: 28 Hình 1.20. Hình mạch não đ
- Page 205 and 206: 30 10. Gây tắc mạch đơn thu
- Page 207 and 208: 32 Kết quả: Ngay cả đối v
- Page 209 and 210: 34 động kinh hết động kinh,
- Page 211 and 212: 36 do sự rung của camera, đi
- Page 213 and 214: 38 được thiết kế cho nhữn
- Page 215: 40 - Tháng 3/1889, D.N Zermov, ph
- Page 219 and 220: 44 - 1993, Hardy và cộng sự đ
- Page 221 and 222: 46 Hình 1.29. Hệ thống sử d
- Page 223 and 224: 48 Phần mềm máy tính và hi
- Page 225 and 226: 50 - 1993, Galloway và cộng sự
- Page 227 and 228: 52 đoán và mối tương quan gi
- Page 229 and 230: 54 từ tính để tạo ra bản
- Page 231 and 232: 56 Chƣơng 2. ĐỐI TƢỢNG VÀ
- Page 233 and 234: 58 2.2.6.3. Lâm sàng trƣớc ph
- Page 235 and 236: 60 - Kích thước DDĐTMN đượ
- Page 237 and 238: 62 2.2.8. Điều trị phẫu thu
- Page 239 and 240: 64 • Nếu DDĐTMN có túi phìn
- Page 241 and 242: 66 Hình 2.5. Xác định nguồn
- Page 243 and 244: 68 E. Tổn thương sâu: không n
- Page 245 and 246: 70 - Nhũn não (ischemie) sau mổ
- Page 247 and 248: 72 Chƣơng 3. KẾT QUẢ NGHIÊN
- Page 249 and 250: 74 3.1.5. Tiền sử số lần xu
- Page 251 and 252: 76 3.2.3. Dị dạng động tĩnh
- Page 253 and 254: 78 3.2.7. Tƣơng quan kích thƣ
- Page 255 and 256: 80 3.2.11. Vị trí DDĐTM Biểu
- Page 257 and 258: 82 3.2.14. Tƣơng quan các nguồ
- Page 259 and 260: 84 3.3.2. Biến số liên quan đ
- Page 261 and 262: 86 3.3.6. Sự liên quan vị trí
- Page 263 and 264: 88 3.4.4. Chẩn đoán hình ảnh
- Page 265 and 266: 90 3.4.8. Thời gian theo dõi b
- Page 267 and 268:
92 4.1.2. Triệu chứng lâm sàn
- Page 269 and 270:
94 bệnh nhân có dị dạng. Nh
- Page 271 and 272:
96 Trên CHT, việc giảm tín hi
- Page 273 and 274:
98 động mạch nuôi, nhân dị
- Page 275 and 276:
100 4.2.3. Vị trí DDĐTM Vị tr
- Page 277 and 278:
102 sâu có thành mạch máu b
- Page 279 and 280:
104 độ IV chúng tôi có 6 trư
- Page 281 and 282:
106 những túi phình trong búi
- Page 283 and 284:
108 huyết bắt đầu tan, loãn
- Page 285 and 286:
110 DDĐTM Bảng 4.7. Biến số
- Page 287 and 288:
112 phức hợp thông trước v
- Page 289 and 290:
114 Một khả năng khó khăn v
- Page 291 and 292:
116 Trước mổ Sau mổ Hình 4.
- Page 293 and 294:
118 thoảng chúng tôi sử dụn
- Page 295 and 296:
120 Phẫu thuật DDĐTM kèm túi
- Page 297 and 298:
122 nhưng thời gian phẫu thu
- Page 299 and 300:
124 Trong nhóm 311 bệnh nhân DD
- Page 301 and 302:
126 4.4.3. Nhận xét kết quả
- Page 303 and 304:
128 dị dạng động tĩnh mạc
- Page 305 and 306:
130 Phương thức theo dõi: bệ
- Page 307 and 308:
132 DDĐTMN chia theo hệ thống
- Page 309 and 310:
134 KIẾN NGHỊ Phẫu thuật DD
- Page 311 and 312:
TÀI LIỆU THAM KHẢO Tiếng Vi
- Page 313 and 314:
148. Barnett, Gene H. et al (1993).
- Page 315 and 316:
165. Fleetwood I.G., Marcellus M.L.
- Page 317 and 318:
180. Hata, Nobuhiko (1997). “Deve
- Page 319 and 320:
198. Lawton, M.T.; Du, Rose; Tran,
- Page 321 and 322:
excision and conservative managemen
- Page 323 and 324:
230. Pollock B., Flickinger J., Lun
- Page 325 and 326:
247. Taylor Christopher L., Kim Dut
- Page 327 and 328:
Tiếng Pháp 262. Pierot L., Cogna
- Page 329 and 330:
CT-Scan: CMMNXN (trước mổ) Tá
- Page 331 and 332:
BỆNH ÁN 3: Máu tụ sau phẫu
- Page 333 and 334:
12) Bán manh Phải, Có ☐ Khôn
- Page 335 and 336:
- Máu tụ: dưới màng cứng t
- Page 337:
VIII. XUẤT VIỆN: - GOS khi xu