

Diplomarbeit (*.pdf - 5,3MB) - Faculty of Computer Science ...
Diplomarbeit (*.pdf - 5,3MB) - Faculty of Computer Science ...
Diplomarbeit (*.pdf - 5,3MB) - Faculty of Computer Science ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
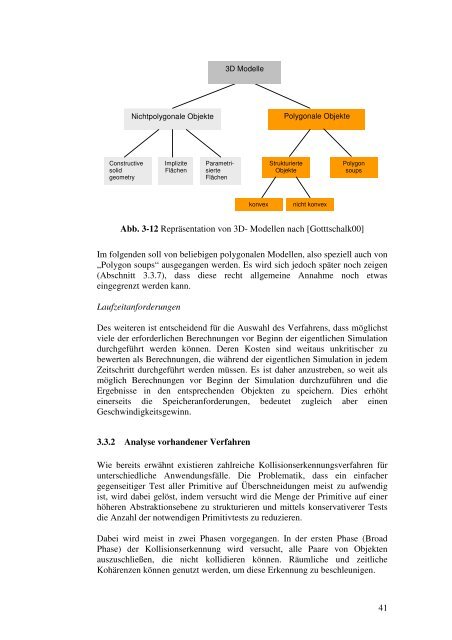
Constructive<br />
solid<br />
geometry<br />
Nichtpolygonale Objekte Polygonale Objekte<br />
Implizite<br />
Flächen<br />
Abb. 3-12 Repräsentation von 3D- Modellen nach [Gotttschalk00]<br />
Im folgenden soll von beliebigen polygonalen Modellen, also speziell auch von<br />
„Polygon soups“ ausgegangen werden. Es wird sich jedoch später noch zeigen<br />
(Abschnitt 3.3.7), dass diese recht allgemeine Annahme noch etwas<br />
eingegrenzt werden kann.<br />
Laufzeitanforderungen<br />
Parametrisierte<br />
Flächen<br />
3D Modelle<br />
Des weiteren ist entscheidend für die Auswahl des Verfahrens, dass möglichst<br />
viele der erforderlichen Berechnungen vor Beginn der eigentlichen Simulation<br />
durchgeführt werden können. Deren Kosten sind weitaus unkritischer zu<br />
bewerten als Berechnungen, die während der eigentlichen Simulation in jedem<br />
Zeitschritt durchgeführt werden müssen. Es ist daher anzustreben, so weit als<br />
möglich Berechnungen vor Beginn der Simulation durchzuführen und die<br />
Ergebnisse in den entsprechenden Objekten zu speichern. Dies erhöht<br />
einerseits die Speicheranforderungen, bedeutet zugleich aber einen<br />
Geschwindigkeitsgewinn.<br />
3.3.2 Analyse vorhandener Verfahren<br />
konvex<br />
Strukturierte<br />
Objekte<br />
nicht konvex<br />
Polygon<br />
soups<br />
Wie bereits erwähnt existieren zahlreiche Kollisionserkennungsverfahren für<br />
unterschiedliche Anwendungsfälle. Die Problematik, dass ein einfacher<br />
gegenseitiger Test aller Primitive auf Überschneidungen meist zu aufwendig<br />
ist, wird dabei gelöst, indem versucht wird die Menge der Primitive auf einer<br />
höheren Abstraktionsebene zu strukturieren und mittels konservativerer Tests<br />
die Anzahl der notwendigen Primitivtests zu reduzieren.<br />
Dabei wird meist in zwei Phasen vorgegangen. In der ersten Phase (Broad<br />
Phase) der Kollisionserkennung wird versucht, alle Paare von Objekten<br />
auszuschließen, die nicht kollidieren können. Räumliche und zeitliche<br />
Kohärenzen können genutzt werden, um diese Erkennung zu beschleunigen.<br />
41














