

Diplomarbeit (*.pdf - 5,3MB) - Faculty of Computer Science ...
Diplomarbeit (*.pdf - 5,3MB) - Faculty of Computer Science ...
Diplomarbeit (*.pdf - 5,3MB) - Faculty of Computer Science ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
4.3.4 Primitivtest<br />
In Abschnitt 3.3.7 wurde der Algorithmus nach [Devillers02] vorgestellt.<br />
Dieser wurde von den Autoren in C++ implementiert. Die Quellen sind frei<br />
verfügbar und wurden daher in die Java-Programmiersprache übersetzt.<br />
Die Autoren weisen jedoch darauf hin, dass diese Implementierung die<br />
Ausnahme, dass alle Punkte eines Dreiecks auf einer Linie oder gar einem<br />
einzigen Punkt liegen, nicht korrekt behandelt. Da der implementierte Test für<br />
solche Ausnahmefälle ein positives Ergebnis liefert, d.h. eine Überlappung der<br />
Primitive angezeigt wird, muss diese Ausnahme gesondert behandelt werden.<br />
Dazu soll die Fläche der Dreiecke bestimmt werden. Ist diese Null, so liegen<br />
die Punkte auf einer Geraden oder sind identisch. Da diese Dreiecke der Fläche<br />
Null keine räumliche Präsenz haben, sollen sie von der Kollisionserkennung<br />
ausgeschlossen werden.<br />
4.3.5 Konfiguration<br />
In Abschnitt 3.3 wurde analysiert, dass für eine optimale Kollisionskontrolle so<br />
weit als möglich die Nutzung von a-priori-Wissen anzustreben ist. Dieses kann<br />
in der einfachsten Form genutzt werden, indem der Anwender in einem<br />
vorbereitenden Schritt alle Objektpaare oder einzelne Objekte von der<br />
Kollisionserkennung ausschließt, von denen er entweder weiß, dass diese nicht<br />
kollidieren können oder deren Kollisionen nicht von Interesse sind.<br />
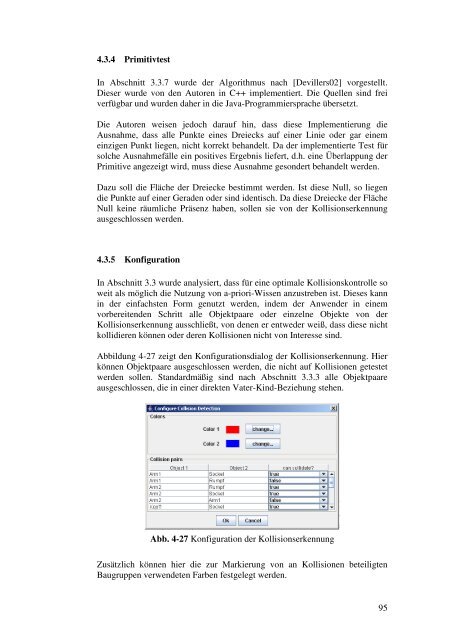
Abbildung 4-27 zeigt den Konfigurationsdialog der Kollisionserkennung. Hier<br />
können Objektpaare ausgeschlossen werden, die nicht auf Kollisionen getestet<br />
werden sollen. Standardmäßig sind nach Abschnitt 3.3.3 alle Objektpaare<br />
ausgeschlossen, die in einer direkten Vater-Kind-Beziehung stehen.<br />
Abb. 4-27 Konfiguration der Kollisionserkennung<br />
Zusätzlich können hier die zur Markierung von an Kollisionen beteiligten<br />
Baugruppen verwendeten Farben festgelegt werden.<br />
95














