

Bahnplanungsframework für ein autonomes Fahrzeug - oops ...
Bahnplanungsframework für ein autonomes Fahrzeug - oops ...
Bahnplanungsframework für ein autonomes Fahrzeug - oops ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
18 Grundlagen<br />
2.3.4 SCHRITT 3: SCHNITTEST POLYGON MIT POLYGON<br />
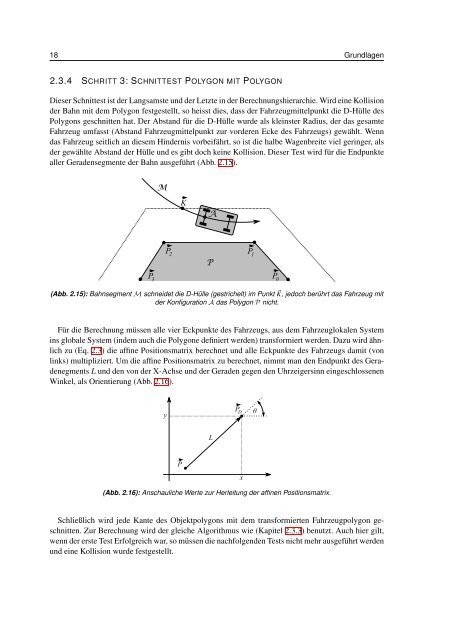
Dieser Schnittest ist der Langsamste und der Letzte in der Berechnungshierarchie. Wird <strong>ein</strong>e Kollision<br />
der Bahn mit dem Polygon festgestellt, so heisst dies, dass der <strong>Fahrzeug</strong>mittelpunkt die D-Hülle des<br />
Polygons geschnitten hat. Der Abstand <strong>für</strong> die D-Hülle wurde als kl<strong>ein</strong>ster Radius, der das gesamte<br />
<strong>Fahrzeug</strong> umfasst (Abstand <strong>Fahrzeug</strong>mittelpunkt zur vorderen Ecke des <strong>Fahrzeug</strong>s) gewählt. Wenn<br />
das <strong>Fahrzeug</strong> seitlich an diesem Hindernis vorbeifährt, so ist die halbe Wagenbreite viel geringer, als<br />
der gewählte Abstand der Hülle und es gibt doch k<strong>ein</strong>e Kollision. Dieser Test wird <strong>für</strong> die Endpunkte<br />
aller Geradensegmente der Bahn ausgeführt (Abb. 2.15).<br />
M<br />
K<br />
A<br />
P 2<br />
P<br />
P 1<br />
P 0<br />
P 3<br />
(Abb. 2.15): Bahnsegment M schneidet die D-Hülle (gestrichelt) im Punkt ⃗K, jedoch berührt das <strong>Fahrzeug</strong> mit<br />
der Konfiguration A das Polygon P nicht.<br />
Für die Berechnung müssen alle vier Eckpunkte des <strong>Fahrzeug</strong>s, aus dem <strong>Fahrzeug</strong>lokalen System<br />
ins globale System (indem auch die Polygone definiert werden) transformiert werden. Dazu wird ähnlich<br />
zu (Eq. 2.3) die affine Positionsmatrix berechnet und alle Eckpunkte des <strong>Fahrzeug</strong>s damit (von<br />
links) multipliziert. Um die affine Positionsmatrix zu berechnet, nimmt man den Endpunkt des Geradenegments<br />
L und den von der X-Achse und der Geraden gegen den Uhrzeigersinn <strong>ein</strong>geschlossenen<br />
Winkel, als Orientierung (Abb. 2.16).<br />
y<br />
P D<br />
θ<br />
L<br />
P<br />
(Abb. 2.16): Anschauliche Werte zur Herleitung der affinen Positionsmatrix.<br />
x<br />
Schließlich wird jede Kante des Objektpolygons mit dem transformierten <strong>Fahrzeug</strong>polygon geschnitten.<br />
Zur Berechnung wird der gleiche Algorithmus wie (Kapitel 2.3.3) benutzt. Auch hier gilt,<br />
wenn der erste Test Erfolgreich war, so müssen die nachfolgenden Tests nicht mehr ausgeführt werden<br />
und <strong>ein</strong>e Kollision wurde festgestellt.













