

Bahnplanungsframework für ein autonomes Fahrzeug - oops ...
Bahnplanungsframework für ein autonomes Fahrzeug - oops ...
Bahnplanungsframework für ein autonomes Fahrzeug - oops ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
64 Suchalgorithmen<br />
Wo noch A* mit gewichtetem Abstand <strong>ein</strong> Fehlverhalten aufwies (Abb. 6.7), berechnet A* mit<br />
gewichteter Orientierung <strong>ein</strong>e korrekte Bahn, sogar mit Rangieren, um das Ziel hinter der Startkonfiguration<br />
zu erreichen. Auch die Äquidistanz der Primitiven ist nicht mehr notwendig, denn es<br />
wird die Primitive bevorzugt, die besser Richtung Ziel zeigt, um sich in diese Richtung auszubreiten<br />
(Abb. 6.9).<br />
Wo der A* Algorithmus mit gewichtetem Abstand noch s<strong>ein</strong>e Vorteile hat, hat die gewichtete Orientierung<br />
leider ihren Nachteil, denn kommt <strong>ein</strong> Hindernis in den Weg zwischen Start- und Endkonfiguration,<br />
werden Primitiven mit Ausrichtung zum Ziel bevorzugt, so dass um das Hindernis nur schwer<br />
umfahren werden kann, denn da<strong>für</strong> muss man mit der Orientierung vom Ziel abweichen. Die Suche<br />
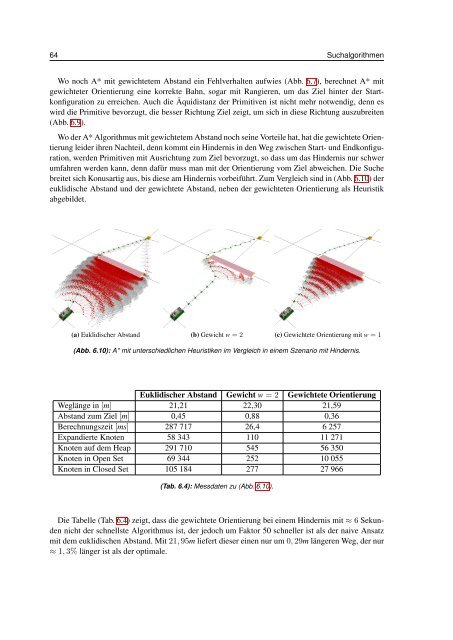
breitet sich Konusartig aus, bis diese am Hindernis vorbeiführt. Zum Vergleich sind in (Abb. 6.10) der<br />
euklidische Abstand und der gewichtete Abstand, neben der gewichteten Orientierung als Heuristik<br />
abgebildet.<br />
(a) Euklidischer Abstand (b) Gewicht w = 2 (c) Gewichtete Orientierung mit w = 1<br />
(Abb. 6.10): A* mit unterschiedlichen Heuristiken im Vergleich in <strong>ein</strong>em Szenario mit Hindernis.<br />
Euklidischer Abstand Gewicht w = 2 Gewichtete Orientierung<br />
Weglänge in [m] 21,21 22,30 21,59<br />
Abstand zum Ziel [m] 0,45 0,88 0,36<br />
Berechnungszeit [ms] 287 717 26,4 6 257<br />
Expandierte Knoten 58 343 110 11 271<br />
Knoten auf dem Heap 291 710 545 56 350<br />
Knoten in Open Set 69 344 252 10 055<br />
Knoten in Closed Set 105 184 277 27 966<br />
(Tab. 6.4): Messdaten zu (Abb. 6.10).<br />
Die Tabelle (Tab. 6.4) zeigt, dass die gewichtete Orientierung bei <strong>ein</strong>em Hindernis mit ≈ 6 Sekunden<br />
nicht der schnellste Algorithmus ist, der jedoch um Faktor 50 schneller ist als der naive Ansatz<br />
mit dem euklidischen Abstand. Mit 21, 95m liefert dieser <strong>ein</strong>en nur um 0, 29m längeren Weg, der nur<br />
≈ 1, 3% länger ist als der optimale.













