

Bahnplanungsframework für ein autonomes Fahrzeug - oops ...
Bahnplanungsframework für ein autonomes Fahrzeug - oops ...
Bahnplanungsframework für ein autonomes Fahrzeug - oops ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
20 Grundlagen<br />
Der Grund, dass man hier mit der Krümmung, statt wie in (Eq. 2.1) definiert mit dem Radius<br />
arbeitet, ist der mathematische Hintergrund, dass der Radius <strong>für</strong> die Gerade unendlich ist und die<br />
Krümmung bei 0 beginnt und anwächst und damit leichter zu rechnen ist.<br />
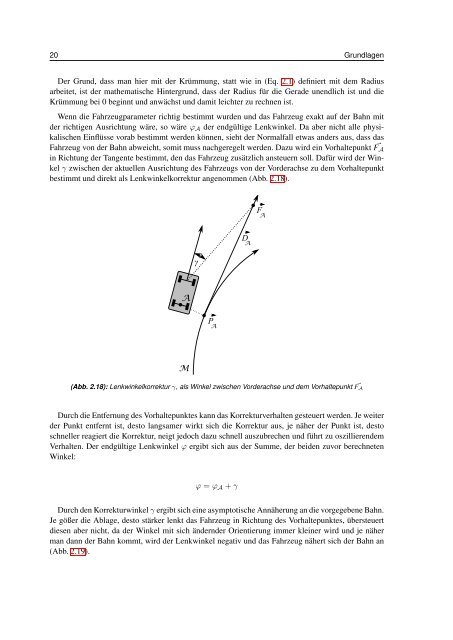
Wenn die <strong>Fahrzeug</strong>parameter richtig bestimmt wurden und das <strong>Fahrzeug</strong> exakt auf der Bahn mit<br />
der richtigen Ausrichtung wäre, so wäre ϕ A der endgültige Lenkwinkel. Da aber nicht alle physikalischen<br />
Einflüsse vorab bestimmt werden können, sieht der Normalfall etwas anders aus, dass das<br />
<strong>Fahrzeug</strong> von der Bahn abweicht, somit muss nachgeregelt werden. Dazu wird <strong>ein</strong> Vorhaltepunkt F⃗<br />
A<br />
in Richtung der Tangente bestimmt, den das <strong>Fahrzeug</strong> zusätzlich ansteuern soll. Da<strong>für</strong> wird der Winkel<br />
γ zwischen der aktuellen Ausrichtung des <strong>Fahrzeug</strong>s von der Vorderachse zu dem Vorhaltepunkt<br />
bestimmt und direkt als Lenkwinkelkorrektur angenommen (Abb. 2.18).<br />
F<br />
A<br />
D<br />
A<br />
γ<br />
A<br />
P<br />
A<br />
M<br />
(Abb. 2.18): Lenkwinkelkorrektur γ, als Winkel zwischen Vorderachse und dem Vorhaltepunkt ⃗ F A<br />
Durch die Entfernung des Vorhaltepunktes kann das Korrekturverhalten gesteuert werden. Je weiter<br />
der Punkt entfernt ist, desto langsamer wirkt sich die Korrektur aus, je näher der Punkt ist, desto<br />
schneller reagiert die Korrektur, neigt jedoch dazu schnell auszubrechen und führt zu oszillierendem<br />
Verhalten. Der endgültige Lenkwinkel ϕ ergibt sich aus der Summe, der beiden zuvor berechneten<br />
Winkel:<br />
ϕ = ϕ A + γ<br />
Durch den Korrekturwinkel γ ergibt sich <strong>ein</strong>e asymptotische Annäherung an die vorgegebene Bahn.<br />
Je gößer die Ablage, desto stärker lenkt das <strong>Fahrzeug</strong> in Richtung des Vorhaltepunktes, übersteuert<br />
diesen aber nicht, da der Winkel mit sich ändernder Orientierung immer kl<strong>ein</strong>er wird und je näher<br />
man dann der Bahn kommt, wird der Lenkwinkel negativ und das <strong>Fahrzeug</strong> nähert sich der Bahn an<br />
(Abb. 2.19).













