

Bahnplanungsframework für ein autonomes Fahrzeug - oops ...
Bahnplanungsframework für ein autonomes Fahrzeug - oops ...
Bahnplanungsframework für ein autonomes Fahrzeug - oops ...

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
86 Reeds Shepp<br />
C 1<br />
C<br />
. . 2<br />
C 1 . .<br />
C<br />
. 2<br />
M<br />
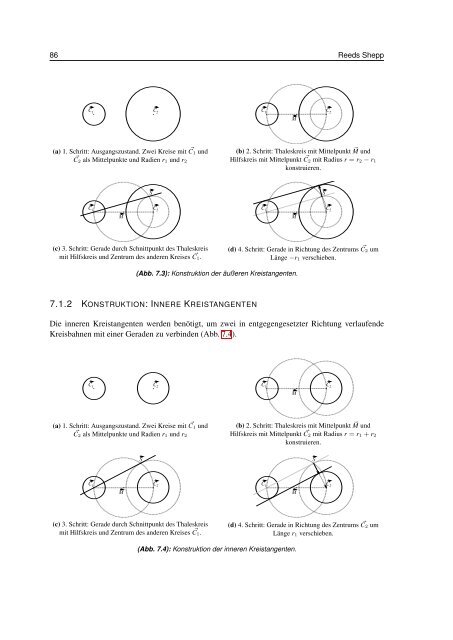
(a) 1. Schritt: Ausgangszustand. Zwei Kreise mit ⃗C 1 und (b) 2. Schritt: Thaleskreis mit Mittelpunkt ⃗M und<br />
⃗C 2 als Mittelpunkte und Radien r 1 und r 2 Hilfskreis mit Mittelpunkt ⃗C 2 mit Radius r = r 2 − r 1<br />
konstruieren.<br />
S<br />
.<br />
C 1 . .<br />
C<br />
. 2<br />
M<br />
S<br />
.<br />
C 1 . .<br />
C<br />
. 2<br />
M<br />
(c) 3. Schritt: Gerade durch Schnittpunkt des Thaleskreis<br />
mit Hilfskreis und Zentrum des anderen Kreises ⃗C 1.<br />
(d) 4. Schritt: Gerade in Richtung des Zentrums ⃗C 2 um<br />
Länge −r 1 verschieben.<br />
(Abb. 7.3): Konstruktion der äußeren Kreistangenten.<br />
7.1.2 KONSTRUKTION: INNERE KREISTANGENTEN<br />
Die inneren Kreistangenten werden benötigt, um zwei in entgegengesetzter Richtung verlaufende<br />
Kreisbahnen mit <strong>ein</strong>er Geraden zu verbinden (Abb. 7.4).<br />
C 1<br />
C<br />
. . 2<br />
C 1 . .<br />
C<br />
. 2<br />
M<br />
(a) 1. Schritt: Ausgangszustand. Zwei Kreise mit ⃗C 1 und (b) 2. Schritt: Thaleskreis mit Mittelpunkt ⃗M und<br />
⃗C 2 als Mittelpunkte und Radien r 1 und r 2 Hilfskreis mit Mittelpunkt ⃗C 2 mit Radius r = r 1 + r 2<br />
konstruieren.<br />
Ṣ<br />
Ṣ<br />
C 1 . .<br />
C<br />
. 2<br />
M<br />
C 1 . .<br />
C<br />
. 2<br />
M<br />
(c) 3. Schritt: Gerade durch Schnittpunkt des Thaleskreis<br />
mit Hilfskreis und Zentrum des anderen Kreises ⃗C 1.<br />
(d) 4. Schritt: Gerade in Richtung des Zentrums ⃗C 2 um<br />
Länge r 1 verschieben.<br />
(Abb. 7.4): Konstruktion der inneren Kreistangenten.













