

Bahnplanungsframework für ein autonomes Fahrzeug - oops ...
Bahnplanungsframework für ein autonomes Fahrzeug - oops ...
Bahnplanungsframework für ein autonomes Fahrzeug - oops ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
34 Motion Primitives<br />
S = (0, 0, 0)<br />
M<br />
G<br />
M<br />
= (x, 0, 0)<br />
M<br />
(Abb. 4.1): Motion Primitive: Gerade<br />
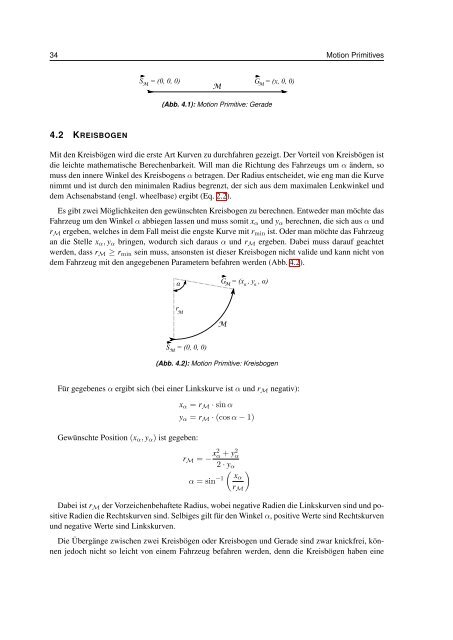
4.2 KREISBOGEN<br />
Mit den Kreisbögen wird die erste Art Kurven zu durchfahren gezeigt. Der Vorteil von Kreisbögen ist<br />
die leichte mathematische Berechenbarkeit. Will man die Richtung des <strong>Fahrzeug</strong>s um α ändern, so<br />
muss den innere Winkel des Kreisbogens α betragen. Der Radius entscheidet, wie eng man die Kurve<br />
nimmt und ist durch den minimalen Radius begrenzt, der sich aus dem maximalen Lenkwinkel und<br />
dem Achsenabstand (engl. wheelbase) ergibt (Eq. 2.2).<br />
Es gibt zwei Möglichkeiten den gewünschten Kreisbogen zu berechnen. Entweder man möchte das<br />
<strong>Fahrzeug</strong> um den Winkel α abbiegen lassen und muss somit x α und y α berechnen, die sich aus α und<br />
r M ergeben, welches in dem Fall meist die engste Kurve mit r min ist. Oder man möchte das <strong>Fahrzeug</strong><br />
an die Stelle x α , y α bringen, wodurch sich daraus α und r M ergeben. Dabei muss darauf geachtet<br />
werden, dass r M ≥ r min s<strong>ein</strong> muss, ansonsten ist dieser Kreisbogen nicht valide und kann nicht von<br />
dem <strong>Fahrzeug</strong> mit den angegebenen Parametern befahren werden (Abb. 4.2).<br />
α<br />
G = (x , y , α)<br />
M α α<br />
r M<br />
M<br />
S = (0, 0, 0)<br />
M<br />
(Abb. 4.2): Motion Primitive: Kreisbogen<br />
Für gegebenes α ergibt sich (bei <strong>ein</strong>er Linkskurve ist α und r M negativ):<br />
Gewünschte Position (x α , y α ) ist gegeben:<br />
x α = r M · sin α<br />
y α = r M · (cos α − 1)<br />
r M = − x2 α + y 2 α<br />
2 · y<br />
( α<br />
)<br />
α = sin −1 xα<br />
r M<br />
Dabei ist r M der Vorzeichenbehaftete Radius, wobei negative Radien die Linkskurven sind und positive<br />
Radien die Rechtskurven sind. Selbiges gilt <strong>für</strong> den Winkel α, positive Werte sind Rechtskurven<br />
und negative Werte sind Linkskurven.<br />
Die Übergänge zwischen zwei Kreisbögen oder Kreisbogen und Gerade sind zwar knickfrei, können<br />
jedoch nicht so leicht von <strong>ein</strong>em <strong>Fahrzeug</strong> befahren werden, denn die Kreisbögen haben <strong>ein</strong>e













