

Bahnplanungsframework für ein autonomes Fahrzeug - oops ...
Bahnplanungsframework für ein autonomes Fahrzeug - oops ...
Bahnplanungsframework für ein autonomes Fahrzeug - oops ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
24 Grundlagen<br />
A 2<br />
A 1<br />
(a) <strong>Fahrzeug</strong> verpasst Kurven<strong>ein</strong>fahrt.<br />
M 1<br />
M 2<br />
M 2<br />
A 1<br />
A 2<br />
M 1<br />
(b) <strong>Fahrzeug</strong> verpasst Kurvenausfahrt.<br />
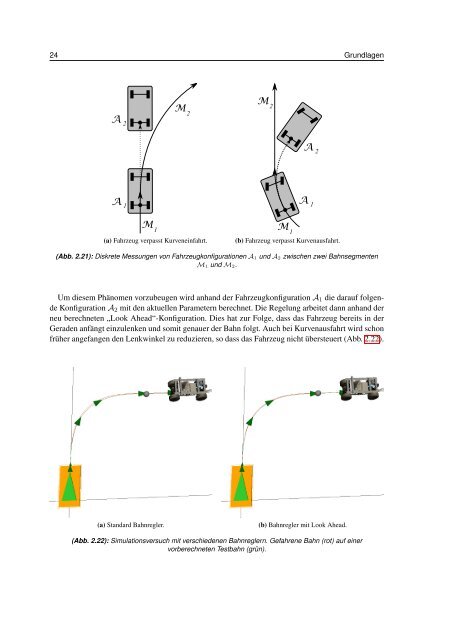
(Abb. 2.21): Diskrete Messungen von <strong>Fahrzeug</strong>konfigurationen A 1 und A 2 zwischen zwei Bahnsegmenten<br />
M 1 und M 2.<br />
Um diesem Phänomen vorzubeugen wird anhand der <strong>Fahrzeug</strong>konfiguration A 1 die darauf folgende<br />
Konfiguration A 2 mit den aktuellen Parametern berechnet. Die Regelung arbeitet dann anhand der<br />
neu berechneten „Look Ahead“-Konfiguration. Dies hat zur Folge, dass das <strong>Fahrzeug</strong> bereits in der<br />
Geraden anfängt <strong>ein</strong>zulenken und somit genauer der Bahn folgt. Auch bei Kurvenausfahrt wird schon<br />
früher angefangen den Lenkwinkel zu reduzieren, so dass das <strong>Fahrzeug</strong> nicht übersteuert (Abb. 2.22).<br />
(a) Standard Bahnregler.<br />
(b) Bahnregler mit Look Ahead.<br />
(Abb. 2.22): Simulationsversuch mit verschiedenen Bahnreglern. Gefahrene Bahn (rot) auf <strong>ein</strong>er<br />
vorberechneten Testbahn (grün).













