

Bahnplanungsframework für ein autonomes Fahrzeug - oops ...
Bahnplanungsframework für ein autonomes Fahrzeug - oops ...
Bahnplanungsframework für ein autonomes Fahrzeug - oops ...

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
44 Sampling<br />
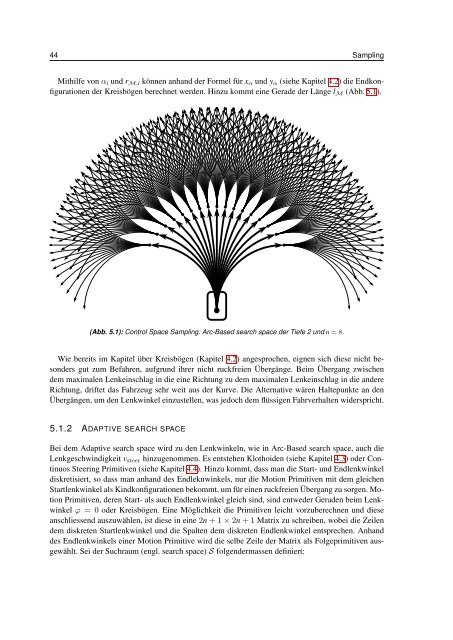
Mithilfe von α i und r M,i können anhand der Formel <strong>für</strong> x α und y α (siehe Kapitel 4.2) die Endkonfigurationen<br />
der Kreisbögen berechnet werden. Hinzu kommt <strong>ein</strong>e Gerade der Länge l M (Abb. 5.1).<br />
(Abb. 5.1): Control Space Sampling: Arc-Based search space der Tiefe 2 und n = 8.<br />
Wie bereits im Kapitel über Kreisbögen (Kapitel 4.2) angesprochen, eignen sich diese nicht besonders<br />
gut zum Befahren, aufgrund ihrer nicht ruckfreien Übergänge. Beim Übergang zwischen<br />
dem maximalen Lenk<strong>ein</strong>schlag in die <strong>ein</strong>e Richtung zu dem maximalen Lenk<strong>ein</strong>schlag in die andere<br />
Richtung, driftet das <strong>Fahrzeug</strong> sehr weit aus der Kurve. Die Alternative wären Haltepunkte an den<br />
Übergängen, um den Lenkwinkel <strong>ein</strong>zustellen, was jedoch dem flüssigen Fahrverhalten widerspricht.<br />
5.1.2 ADAPTIVE SEARCH SPACE<br />
Bei dem Adaptive search space wird zu den Lenkwinkeln, wie in Arc-Based search space, auch die<br />
Lenkgeschwindigkeit v steer hinzugenommen. Es entstehen Klothoiden (siehe Kapitel 4.3) oder Continuos<br />
Steering Primitiven (siehe Kapitel 4.4). Hinzu kommt, dass man die Start- und Endlenkwinkel<br />
diskretisiert, so dass man anhand des Endleknwinkels, nur die Motion Primitiven mit dem gleichen<br />
Startlenkwinkel als Kindkonfigurationen bekommt, um <strong>für</strong> <strong>ein</strong>en ruckfreien Übergang zu sorgen. Motion<br />
Primitiven, deren Start- als auch Endlenkwinkel gleich sind, sind entweder Geraden beim Lenkwinkel<br />
ϕ = 0 oder Kreisbögen. Eine Möglichkeit die Primitiven leicht vorzuberechnen und diese<br />
anschliessend auszuwählen, ist diese in <strong>ein</strong>e 2n + 1 × 2n + 1 Matrix zu schreiben, wobei die Zeilen<br />
dem diskreten Startlenkwinkel und die Spalten dem diskreten Endlenkwinkel entsprechen. Anhand<br />
des Endlenkwinkels <strong>ein</strong>er Motion Primitive wird die selbe Zeile der Matrix als Folgeprimitiven ausgewählt.<br />
Sei der Suchraum (engl. search space) S folgendermassen definiert:













