Beugung und Interferenz - Walther Meißner Institut
Beugung und Interferenz - Walther Meißner Institut
Beugung und Interferenz - Walther Meißner Institut

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
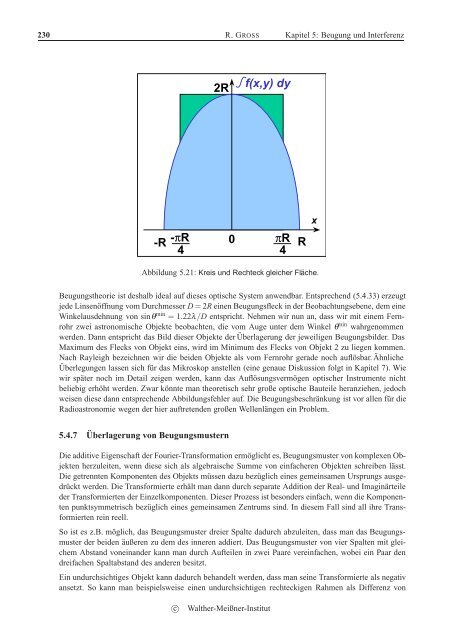
230 R. GROSS Kapitel 5: <strong>Beugung</strong> <strong>und</strong> <strong>Interferenz</strong>2Rf(x,y) dy-R-πR 04πR4RxAbbildung 5.21: Kreis <strong>und</strong> Rechteck gleicher Fläche.<strong>Beugung</strong>stheorie ist deshalb ideal auf dieses optische System anwendbar. Entsprechend (5.4.33) erzeugtjede Linsenöffnung vom Durchmesser D = 2R einen <strong>Beugung</strong>sfleck in der Beobachtungsebene, dem eineWinkelausdehnung von sinθ min = 1.22λ/D entspricht. Nehmen wir nun an, dass wir mit einem Fernrohrzwei astronomische Objekte beobachten, die vom Auge unter dem Winkel θ min wahrgenommenwerden. Dann entspricht das Bild dieser Objekte der Überlagerung der jeweiligen <strong>Beugung</strong>sbilder. DasMaximum des Flecks von Objekt eins, wird im Minimum des Flecks von Objekt 2 zu liegen kommen.Nach Rayleigh bezeichnen wir die beiden Objekte als vom Fernrohr gerade noch auflösbar. ÄhnlicheÜberlegungen lassen sich für das Mikroskop anstellen (eine genaue Diskussion folgt in Kapitel 7). Wiewir später noch im Detail zeigen werden, kann das Auflösungsvermögen optischer Instrumente nichtbeliebig erhöht werden. Zwar könnte man theoretisch sehr große optische Bauteile heranziehen, jedochweisen diese dann entsprechende Abbildungsfehler auf. Die <strong>Beugung</strong>sbeschränkung ist vor allen für dieRadioastronomie wegen der hier auftretenden großen Wellenlängen ein Problem.5.4.7 Überlagerung von <strong>Beugung</strong>smusternDie additive Eigenschaft der Fourier-Transformation ermöglicht es, <strong>Beugung</strong>smuster von komplexen Objektenherzuleiten, wenn diese sich als algebraische Summe von einfacheren Objekten schreiben lässt.Die getrennten Komponenten des Objekts müssen dazu bezüglich eines gemeinsamen Ursprungs ausgedrücktwerden. Die Transformierte erhält man dann durch separate Addition der Real- <strong>und</strong> Imaginärteileder Transformierten der Einzelkomponenten. Dieser Prozess ist besonders einfach, wenn die Komponentenpunktsymmetrisch bezüglich eines gemeinsamen Zentrums sind. In diesem Fall sind all ihre Transformiertenrein reell.So ist es z.B. möglich, das <strong>Beugung</strong>smuster dreier Spalte dadurch abzuleiten, dass man das <strong>Beugung</strong>smusterder beiden äußeren zu dem des inneren addiert. Das <strong>Beugung</strong>smuster von vier Spalten mit gleichemAbstand voneinander kann man durch Aufteilen in zwei Paare vereinfachen, wobei ein Paar dendreifachen Spaltabstand des anderen besitzt.Ein <strong>und</strong>urchsichtiges Objekt kann dadurch behandelt werden, dass man seine Transformierte als negativansetzt. So kann man beispielsweise einen <strong>und</strong>urchsichtigen rechteckigen Rahmen als Differenz vonc○<strong>Walther</strong>-Meißner-<strong>Institut</strong>