Programmier-Handbuch
Programmier-Handbuch
Programmier-Handbuch

Erfolgreiche ePaper selbst erstellen
Machen Sie aus Ihren PDF Publikationen ein blätterbares Flipbook mit unserer einzigartigen Google optimierten e-Paper Software.
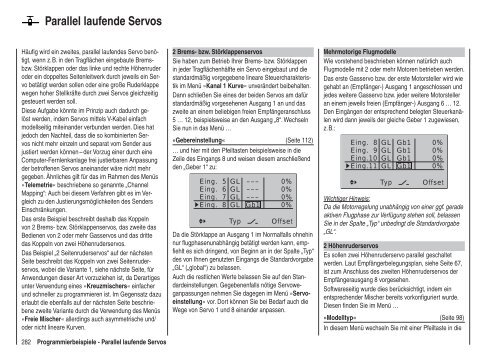
Parallel laufende Servos<br />
Häufig wird ein zweites, parallel laufendes Servo benötigt,<br />
wenn z. B. in den Tragflächen eingebaute Brems-<br />
bzw. Störklappen oder das linke und rechte Höhenruder<br />
oder ein doppeltes Seitenleitwerk durch jeweils ein Servo<br />
betätigt werden sollen oder eine große Ruderklappe<br />
wegen hoher Stellkräfte durch zwei Servos gleichzeitig<br />
gesteuert werden soll.<br />
Diese Aufgabe könnte im Prinzip auch dadurch gelöst<br />
werden, indem Servos mittels V-Kabel einfach<br />
modellseitig miteinander verbunden werden. Dies hat<br />
jedoch den Nachteil, dass die so kombinierten Servos<br />
nicht mehr einzeln und separat vom Sender aus<br />
justiert werden können – der Vorzug einer durch eine<br />
Computer-Fernlenkanlage frei justierbaren Anpassung<br />
der betroffenen Servos aneinander wäre nicht mehr<br />
gegeben. Ähnliches gilt für das im Rahmen des Menüs<br />
»Telemetrie« beschriebene so genannte „Channel<br />
Mapping“: Auch bei diesem Verfahren gibt es im Vergleich<br />
zu den Justierungsmöglichkeiten des Senders<br />
Einschränkungen.<br />
Das erste Beispiel beschreibt deshalb das Koppeln<br />
von 2 Brems- bzw. Störklappenservos, das zweite das<br />
Bedienen von 2 oder mehr Gasservos und das dritte<br />
das Koppeln von zwei Höhenruderservos.<br />
Das Beispiel „2 Seitenruderservos“ auf der nächsten<br />
Seite beschreibt das Koppeln von zwei Seitenruderservos,<br />
wobei die Variante 1, siehe nächste Seite, für<br />
Anwendungen dieser Art vorzuziehen ist, da Derartiges<br />
unter Verwendung eines »Kreuzmischers« einfacher<br />
und schneller zu programmieren ist. Im Gegensatz dazu<br />
erlaubt die ebenfalls auf der nächsten Seite beschriebene<br />
zweite Variante durch die Verwendung des Menüs<br />
»Freie Mischer« allerdings auch asymmetrische und/<br />
oder nicht lineare Kurven.<br />
282 <strong>Programmier</strong>beispiele - Parallel laufende Servos<br />
2 Brems- bzw. Störklappenservos<br />
Sie haben zum Betrieb Ihrer Brems- bzw. Störklappen<br />
in jeder Tragflächenhälfte ein Servo eingebaut und die<br />
standardmäßig vorgegebene lineare Steuercharakteristik<br />
im Menü »Kanal 1 Kurve« unverändert beibehalten.<br />
Dann schließen Sie eines der beiden Servos am dafür<br />
standardmäßig vorgesehenen Ausgang 1 an und das<br />
zweite an einem beliebigen freien Empfängeranschluss<br />
5 … 12, beispielsweise an den Ausgang „8“. Wechseln<br />
Sie nun in das Menü …<br />
»Gebereinstellung« (Seite 112)<br />
… und hier mit den Pfeiltasten beispielsweise in die<br />
Zeile des Eingangs 8 und weisen diesem anschließend<br />
den „Geber 1“ zu:<br />
Eing. 5 GL<br />
Eing. 6 GL<br />
Eing. 7 GL<br />
Eing. 8 GL<br />
Typ<br />
–––<br />
–––<br />
–––<br />
Gb1<br />
0%<br />
0%<br />
0%<br />
0%<br />
Offset<br />
Da die Störklappe an Ausgang 1 im Normalfalls ohnehin<br />
nur flugphasenunabhängig betätigt werden kann, empfiehlt<br />
es sich dringend, von Beginn an in der Spalte „Typ“<br />
des von Ihnen genutzten Eingangs die Standardvorgabe<br />
„GL“ („global“) zu belassen.<br />
Auch die restlichen Werte belassen Sie auf den Standardeinstellungen.<br />
Gegebenenfalls nötige Servoweganpassungen<br />
nehmen Sie dagegen im Menü »Servoeinstellung«<br />
vor. Dort können Sie bei Bedarf auch die<br />
Wege von Servo 1 und 8 einander anpassen.<br />
Mehrmotorige Flugmodelle<br />
Wie vorstehend beschrieben können natürlich auch<br />
Flugmodelle mit 2 oder mehr Motoren betrieben werden.<br />
Das erste Gasservo bzw. der erste Motorsteller wird wie<br />
gehabt an (Empfänger-) Ausgang 1 angeschlossen und<br />
jedes weitere Gasservo bzw. jeder weitere Motorsteller<br />
an einem jeweils freien (Empfänger-) Ausgang 6 … 12.<br />
Den Eingängen der entsprechend belegten Steuerkanälen<br />
wird dann jeweils der gleiche Geber 1 zugewiesen,<br />
z. B.:<br />
Eing. 8 GL<br />
Eing. 9 GL<br />
Eing.10 GL<br />
Eing.11 GL<br />
Typ<br />
Gb1<br />
Gb1<br />
Gb1<br />
Gb1<br />
0%<br />
0%<br />
0%<br />
0%<br />
Offset<br />
Wichtiger Hinweis:<br />
Da die Motorregelung unabhängig von einer ggf. gerade<br />
aktiven Flugphase zur Verfügung stehen soll, belassen<br />
Sie in der Spalte „Typ“ unbedingt die Standardvorgabe<br />
„GL“.<br />
2 Höhenruderservos<br />
Es sollen zwei Höhenruderservo parallel geschaltet<br />
werden. Laut Empfängerbelegungsplan, siehe Seite 67,<br />
ist zum Anschluss des zweiten Höhenruderservos der<br />
Empfängerausgang 8 vorgesehen.<br />
Softwareseitig wurde dies berücksichtigt, indem ein<br />
entsprechender Mischer bereits vorkonfiguriert wurde.<br />
Diesen finden Sie im Menü …<br />
»Modelltyp« (Seite 98)<br />
In diesem Menü wechseln Sie mit einer Pfeiltaste in die