

Programa 2012/13
Programa 2012/13
Programa 2012/13

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
Explicación de las páginas 204–248<br />
Planos acotados<br />
En el DVD adjunto están disponibles los planos<br />
acotados (archivos DXF) que se pueden importar<br />
desde cualquier sistema de CAD. El método de<br />
proyección utilizado es el E (ISO).<br />
Todas las dimensiones están en [mm].<br />
Roscas de montaje de plástico<br />
Se requiere especial atención en el montaje atornillado<br />
de motores con brida de plástico.<br />
MA Máximo par de apriete [Ncm]<br />
Usar destornillador con limitador de par ajustado<br />
a este valor.<br />
L Rosca efectiva de sujeción [mm]<br />
La relación de la profundidad de la rosca de conexión<br />
con el diámetro de la rosca debe ser como<br />
mínimo de 2:1. No debe sobrepasarse la longitud<br />
de rosca disponible.<br />
Datos del Reductor<br />
Los valores corresponden a una temperatura ambiente<br />
de unos 25°C (datos en frío).<br />
Datos técnicos<br />
Velocidad de entrada recomendada<br />
La velocidad de entrada influye en la vida del reductor.<br />
Si se supera ampliamente el valor recomendado,<br />
la vida del reductor se acortará y se<br />
generará calor y ruido.<br />
Rango de temperatura<br />
El rango de temperatura de las reductoras puede<br />
alcanzar entre -40°C y +100°C, pero a temperaturas<br />
extremadamente bajas se puede esperar un<br />
nivel elevado de consumo. Se puede solicitar bajo<br />
pedido lubricación especial, incluso para otros<br />
rangos de temperatura.<br />
Juego axial<br />
El valor del juego radial depende directamente<br />
del soporte, del punto demedida y de la fuerza<br />
tangente. Por este motivo, se indica siempre el<br />
punto de medida con respecto a la brida. Para estamedición<br />
se utilizan siempre fuerzas inferiores<br />
a la carga radial máxima.<br />
Máxima carga radial permitida<br />
El valor del juego radial depende directamente<br />
del soporte, del punto de medida y de la fuerza<br />
tangente. Por este motivo, se indica siempre el<br />
punto de medida con respecto a la brida. Para<br />
esta medición se utilizan siempre fuerzas inferiores<br />
a la carga radial máxima.<br />
Juego axial<br />
El valor del juego axial de una reductora se de-<br />
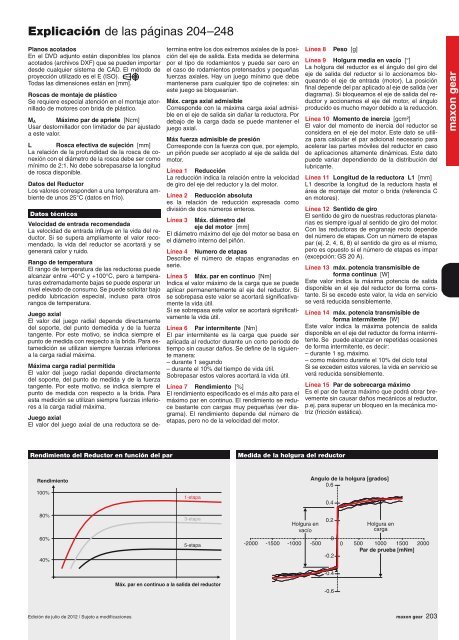
Rendimiento del Reductor en función del par<br />
Rendimiento<br />
100%<br />
80%<br />
60%<br />
40%<br />
termina entre los dos extremos axiales de la posición<br />
del eje de salida. Esta medida se determina<br />
por el tipo de rodamientos y puede ser cero en<br />
el caso de rodamientos pretensados y pequeñas<br />
fuerzas axiales. Hay un juego mínimo que debe<br />
mantenerse para cualquier tipo de cojinetes: sin<br />
este juego se bloquearían.<br />
Máx. carga axial admisible<br />
Corresponde con la máxima carga axial admisible<br />
en el eje de salida sin dañar la reductora. Por<br />
debajo de la carga dada se puede mantener el<br />
juego axial.<br />
Máx fuerza admisible de presión<br />
Corresponde con la fuerza con que, por ejemplo,<br />
un piñón puede ser acoplado al eje de salida del<br />
motor.<br />
Línea 1 Reducción<br />
La reducción indica la relación entre la velocidad<br />
de giro del eje del reductor y la del motor.<br />
Línea 2 Reducción absoluta<br />
es la relación de reducción expresada como<br />
división de dos números enteros.<br />
Línea 3 Máx. diámetro del<br />
eje del motor [mm]<br />
El diámetro máximo del eje del motor se basa en<br />
el diámetro interno del piñón.<br />
Línea 4 Numero de etapas<br />
Describe el número de etapas engranadas en<br />
serie.<br />
Línea 5 Máx. par en continuo [Nm]<br />
Indica el valor máximo de la carga que se puede<br />
aplicar permanentemente al eje del reductor. Si<br />
se sobrepasa este valor se acortará significativamente<br />
la vida útil.<br />
Si se sobrepasa este valor se acortará significativamente<br />
la vida útil.<br />
Línea 6 Par intermitente [Nm]<br />
El par intermitente es la carga que puede ser<br />
aplicada al reductor durante un corto periodo de<br />
tiempo sin causar daños. Se define de la siguiente<br />
manera:<br />
– durante 1 segundo<br />
– durante el 10% del tiempo de vida útil.<br />
Sobrepasar estos valores acortará la vida útil.<br />
Línea 7 Rendimiento [%]<br />
El rendimiento especificado es el más alto para el<br />
máximo par en continuo. El rendimiento se reduce<br />
bastante con cargas muy pequeñas (ver diagrama).<br />
El rendimiento depende del número de<br />
etapas, pero no de la velocidad del motor.<br />
1-etapa<br />
3-etapa<br />
5-etapa<br />
Máx. par en continuo a la salida del reductor<br />
Línea 8 Peso [g]<br />
Medida de la holgura del reductor<br />
Línea 9 Holgura media en vacío [°]<br />
La holgura del reductor es el ángulo del giro del<br />
eje de salida del reductor si lo accionamos bloqueando<br />
el eje de entrada (motor). La posición<br />
final depende del par aplicado al eje de salida (ver<br />
diagrama). Si bloqueamos el eje de salida del reductor<br />
y accionamos el eje del motor, el ángulo<br />
producido es mucho mayor debido a la reducción.<br />
Línea 10 Momento de inercia [gcm²]<br />
El valor del momento de inercia del reductor se<br />
considera en el eje del motor. Este dato se utiliza<br />
para calcular el par adicional necesario para<br />
acelerar las partes móviles del reductor en caso<br />
de aplicaciones altamente dinámicas. Este dato<br />
puede variar dependiendo de la distribución del<br />
lubricante.<br />
Línea 11 Longitud de la reductora L1 [mm]<br />
L1 describe la longitud de la reductora hasta el<br />
área de montaje del motor o brida (referencia C<br />
en motores).<br />
Línea 12 Sentido de giro<br />
El sentido de giro de nuestras reductoras planetarias<br />
es siempre igual al sentido de giro del motor.<br />
Con las reductoras de engranaje recto depende<br />
del número de etapas. Con un número de etapas<br />
par (ej. 2, 4, 6, 8) el sentido de giro es el mismo,<br />
pero es opuesto si el número de etapas es impar<br />
(excepción: GS 20 A).<br />
Línea <strong>13</strong> máx. potencia transmisible de<br />
forma continua [W]<br />
Este valor indica la máxima potencia de salida<br />
disponible en el eje del reductor de forma constante.<br />
Si se excede este valor, la vida en servicio<br />
se verá reducida sensiblemente.<br />
Línea 14 máx. potencia transmisible de<br />
forma intermitente [W]<br />
Este valor indica la máxima potencia de salida<br />
disponible en el eje del reductor de forma intermitente.<br />
Se puede alcanzar en repetidas ocasiones<br />
de forma intermitente, es decir:<br />
– durante 1 sg. máximo.<br />
– como máximo durante el 10% del ciclo total<br />
Si se exceden estos valores, la vida en servicio se<br />
verá reducida sensiblemente.<br />
Línea 15 Par de sobrecarga máximo<br />
Es el par de fuerza máximo que podrá obrar brevemente<br />
sin causar daños mecánicos al reductor,<br />
p.ej. para superar un bloqueo en la mecánica motriz<br />
(fricción estática).<br />
Holgura en<br />
vacío<br />
Angulo de la holgura [grados]<br />
0.6<br />
Edición de julio de <strong>2012</strong> / Sujeto a modificaciones maxon gear<br />
0.4<br />
0.2<br />
0<br />
-2000 -1500 -1000 -500 0 500 1000 1500 2000<br />
Par de prueba [mNm]<br />
-0.2<br />
-0.4<br />
-0.6<br />
Holgura en<br />
carga<br />
203<br />
maxon gear