

Programa 2012/13
Programa 2012/13
Programa 2012/13

Create successful ePaper yourself
Turn your PDF publications into a flip-book with our unique Google optimized e-Paper software.
maxon motor control<br />
EtherCAT. Si un lazo de regulación de posición<br />
PID se cierra mediante el master EtherCAT se<br />
utilizará con frecuencia el modo CST.<br />
Punto a punto<br />
El modo «Profile Position Mode» permite posicionar<br />
el eje del motor desde un punto A a un<br />
punto B. El posicionamiento puede ejecutarse<br />
con respecto al origen absoluto del eje o con<br />
respecto a la posición actual (relativo).<br />
Modo de interpolación de posición<br />
Gracias al modo de interpolación de posición<br />
(IPM), el EPOS3 es capaz de recorrer sincronizadamente<br />
una trayectoria especificada a través<br />
de puntos interpolados. Con una unidad master<br />
adecuada se pueden sincronizar movimientos<br />
multieje y se puede llevar a cabo cualquier perfil<br />
con un sistema de un eje. (PVT = Position and<br />
Velocity versus Time.)<br />
Control de posición y de velocidad<br />
con proalimentación (Feed Forward)<br />
La combinación de retroalimentación y proalimentación<br />
(feed forward) en el control permite el<br />
comportamiento ideal del movimiento. El control<br />
con proalimentación reduce los errores. El<br />
EPOS3 soporta control de velocidad y aceleración<br />
con proalimentación.<br />
Control de velocidad<br />
En el modo «Profile Velocity Mode», el eje del<br />
motor sigue una consigna de velocidad. Esta<br />
velocidad se mantiene hasta recibir una nueva<br />
consigna.<br />
Búsqueda de referencia<br />
El «homing mode» permite referenciar con<br />
respecto a una posición mecánica previamente<br />
establecida (home). Existen más de 30 métodos<br />
disponibles para buscar la posición de referencia.<br />
Entradas de captura<br />
(marcadores de posición)<br />
Las entradas pueden configurarse de forma<br />
que la posición actual del motor es almacenada<br />
cuando aparece un flanco positivo y/o negativo<br />
en una entrada.<br />
Activación de Salida<br />
(comparación de posición)<br />
Las salidas digitales se pueden configurar de tal<br />
manera que emitan una señal digital al alcanzar<br />
una posición configurable.<br />
Doble lazo de control de posición y velocidad<br />
Con un sensor adicional, la carga se puede<br />
controlar directamente con una precisión muy<br />
alta; el control del motor está subordinado. Las<br />
holguras y elasticidades mecánicas se pueden<br />
compensar. Una amplia variedad de sensores<br />
se pueden acoplar: encoder incremental digital,<br />
encoder absoluto SSI, encoder analógico incremental<br />
(sen/cos).<br />
Control de frenos de seguridad<br />
La activación del freno de parada puede integrarse<br />
en la gestión de estado de dispositivos.<br />
Con esto pueden configurarse individualmente<br />
los tiempos de retardo para conexión y desconexión.<br />
Información en datos técnicos<br />
en página 319<br />
318<br />
Estandarizados<br />
Esclavo EtherCAT: CoE (CAN application layer over EtherCAT) según el estándar CANopen<br />
DSP-402 Device Profile Drives and Motion Control. Sencilla integración en los sistemas Ethercat<br />
existentes. Conectable en red con otras unidades EtherCAT. Configurable de forma alternativa<br />
mediante interfaz serie (USB 2.0).<br />
Flexible, modular<br />
Misma tecnología para motores CC con y sin escobillas. Entradas y salidas configurables para<br />
finales de carrera, interruptores de referencia, frenos y otros sensores y displays cercanos al<br />
equipo.<br />
Rápida instalación<br />
Interfaz Gráfico de Usuario (GUI) con numerosas funciones y asistentes para la puesta en marcha,<br />
control automático de ajustes, configuración E/S, pruebas.<br />
EtherCAT Master (Beckhoff TwinCAT ® ): Fácil integración<br />
Sencilla integración del controlador de posición EPOS3 70/10 EtherCAT en el Beckhoff-TwinCAT-<br />
SoftPLC gracias al archivo descriptivo de los dispositivos existentes (ESI-File) y a las instrucciones<br />
de configuración específicas para cada dispositivo.<br />
Tecnología moderna<br />
Control digital de posición, de velocidad y de corriente-par. Conmutación sinusoidal para máximo<br />
aprovechamiento de los motores EC.<br />
+ -<br />
Modos de Funcionamiento<br />
Cyclic Synchronuous Position (CSP), Cyclic<br />
Synchronuous Velocity (CSV), Cyclic Synchronuous<br />
Torque (CST)<br />
Perfil de posición, velocidad y búsqueda de<br />
home<br />
Generador de trayectorias sinusoidales o<br />
trapezoidales<br />
Control previo de velocidad y aceleracióng<br />
(feed forward)<br />
Control de posición con interpolación (PVT)<br />
Conmutación de forma sinoidal o trapezoidal<br />
para los motores EC<br />
Controlador de doble lazo de posición y velocidad<br />
Comunicación<br />
Comunicación via EtherCAT<br />
Configuración<br />
Configuración mediante EtherCAT o USB 2.0<br />
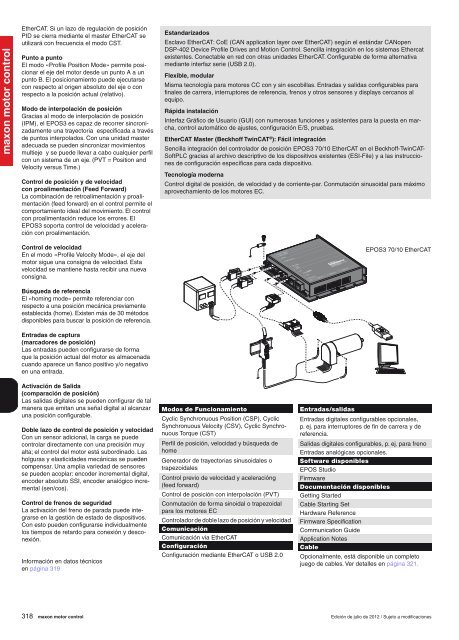
EPOS3 70/10 EtherCAT<br />
Entradas/salidas<br />
Entradas digitales configurables opcionales,<br />
p. ej. para interruptores de fin de carrera y de<br />
referencia.<br />
Salidas digitales configurables, p. ej. para freno<br />
Entradas analógicas opcionales.<br />
Software disponibles<br />
EPOS Studio<br />
Firmware<br />
Documentación disponibles<br />
Getting Started<br />
Cable Starting Set<br />
Hardware Reference<br />
Firmware Specification<br />
Communication Guide<br />
Application Notes<br />
Cable<br />
Opcionalmente, está disponible un completo<br />
juego de cables. Ver detalles en página 321.<br />
maxon motor control Edición de julio de <strong>2012</strong> / Sujeto a modificaciones