Bevezetés a mechatronikába - MEK
Bevezetés a mechatronikába - MEK
Bevezetés a mechatronikába - MEK

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Pneumatikus rendszerek<br />
B01<br />
b0<br />
B<br />
a1<br />
a0<br />
b1<br />
B10<br />
A<br />
C01<br />
A10<br />
A01<br />
c0<br />
c1<br />
C<br />
C10<br />
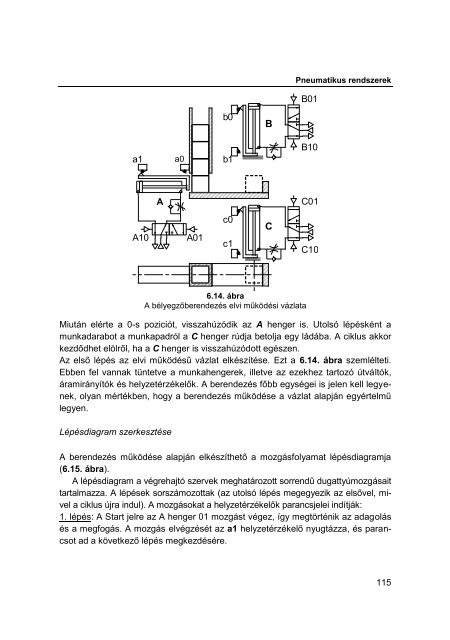
6.14. ábra<br />
A bélyegzőberendezés elvi működési vázlata<br />
Miután elérte a 0-s poziciót, visszahúzódik az A henger is. Utolsó lépésként a<br />
munkadarabot a munkapadról a C henger rúdja betolja egy ládába. A ciklus akkor<br />
kezdődhet elölről, ha a C henger is visszahúzódott egészen.<br />
Az első lépés az elvi működésű vázlat elkészítése. Ezt a 6.14. ábra szemlélteti.<br />
Ebben fel vannak tüntetve a munkahengerek, illetve az ezekhez tartozó útváltók,<br />
áramirányítók és helyzetérzékelők. A berendezés főbb egységei is jelen kell legyenek,<br />
olyan mértékben, hogy a berendezés működése a vázlat alapján egyértelmű<br />
legyen.<br />
Lépésdiagram szerkesztése<br />
A berendezés működése alapján elkészíthető a mozgásfolyamat lépésdiagramja<br />
(6.15. ábra).<br />
A lépésdiagram a végrehajtó szervek meghatározott sorrendű dugattyúmozgásait<br />
tartalmazza. A lépések sorszámozottak (az utolsó lépés megegyezik az elsővel, mivel<br />
a ciklus újra indul). A mozgásokat a helyzetérzékelők parancsjelei indítják:<br />
1. lépés: A Start jelre az A henger 01 mozgást végez, így megtörténik az adagolás<br />
és a megfogás. A mozgás elvégzését az a1 helyzetérzékelő nyugtázza, és parancsot<br />
ad a következő lépés megkezdésére.<br />
115