- Page 3:
FORGÓ ZOLTÁN BEVEZETÉS A MECHATR
- Page 6 and 7:
A könyv megjelenését támogatta:
- Page 8 and 9:
Tartalom 5.4.1. Hidraulikus körfol
- Page 11 and 12:
1. Bevezető Az információs techn
- Page 13 and 14:
2. Mi a mechatronikai rendszer Gyak
- Page 15 and 16:
Mi a mechatronikai rendszer vannak.
- Page 17 and 18:
Mi a mechatronikai rendszer A fenti
- Page 19 and 20:
Fizikai rendszerek modellezése kel
- Page 21 and 22:
3.2. táblázat. Lineáris, mechani
- Page 23 and 24:
Fizikai rendszerek modellezése aho
- Page 25 and 26:
Fizikai rendszerek modellezése A f
- Page 27 and 28:
Fizikai rendszerek modellezése 3.2
- Page 29 and 30:
Fizikai rendszerek modellezése het
- Page 31 and 32:
Fizikai rendszerek modellezése 3.2
- Page 33 and 34:
Fizikai rendszerek modellezése Y(
- Page 35 and 36:
Fizikai rendszerek modellezése Az
- Page 37 and 38:
Fizikai rendszerek modellezése X (
- Page 39 and 40:
Fizikai rendszerek modellezése A t
- Page 41 and 42:
4. A mechatronikai rendszer felép
- Page 43 and 44:
A mechatronikai rendszer felépít
- Page 45 and 46:
A mechatronikai rendszer felépít
- Page 47 and 48:
A mechatronikai rendszer felépít
- Page 49 and 50:
A mechatronikai rendszer felépít
- Page 51 and 52:
A mechatronikai rendszer felépít
- Page 53 and 54:
A mechatronikai rendszer felépít
- Page 55 and 56:
A mechatronikai rendszer felépít
- Page 57 and 58:
A mechatronikai rendszer felépít
- Page 59 and 60:
Hidraulikus rendszerek A hidrauliku
- Page 61 and 62:
Hidraulikus rendszerek tehát, M e
- Page 63 and 64:
5.1.2. Az energiaátalakítók szer
- Page 65 and 66:
Hidraulikus rendszerek tetése mini
- Page 67 and 68:
Hidraulikus rendszerek 1 2 3 4 5.7.
- Page 69 and 70:
Hidraulikus rendszerek A 1 2 3 4 a)
- Page 71 and 72:
Hidraulikus rendszerek Búvárdugat
- Page 73 and 74:
Hidraulikus rendszerek változata i
- Page 75 and 76:
Hidraulikus rendszerek A nyomáshat
- Page 77 and 78:
Hidraulikus rendszerek 5.18. ábra
- Page 79 and 80:
p p A B A A 2 1 Hidraulikus rendsze
- Page 81 and 82:
ahonnan gyártási feltételként t
- Page 83 and 84:
Hidraulikus rendszerek 5.2.3.1. Vis
- Page 85 and 86:
Hidraulikus rendszerek Tolattyús
- Page 87 and 88:
Hidraulikus rendszerek (5.31. ábra
- Page 89 and 90:
Hidraulikus rendszerek 5.32. ábra
- Page 91 and 92:
ásegítő munkafolyadék-forrás,
- Page 93 and 94:
Hidraulikus rendszerek A felsorolt
- Page 95 and 96:
Hidraulikus rendszerek stb. lehet h
- Page 97 and 98:
Hidraulikus rendszerek vagy a fordu
- Page 99 and 100:
Hidraulikus rendszerek A megbízhat
- Page 101 and 102:
Hidraulikus rendszerek sal ellenté
- Page 103 and 104:
Hidraulikus rendszerek VVE 7 4 7 V
- Page 105 and 106:
6. Pneumatikus rendszerek A pneumat
- Page 107 and 108:
Pneumatikus rendszerek ban is össz
- Page 109 and 110:
Pneumatikus rendszerek A B munkahen
- Page 111 and 112:
Pneumatikus rendszerek A 0 1 B 0 1
- Page 113 and 114:
Pneumatikus rendszerek B 0 1 A 0 1
- Page 115 and 116:
Pneumatikus rendszerek van, míg a
- Page 117 and 118:
Pneumatikus rendszerek B01 b0 B a1
- Page 119 and 120:
Pneumatikus rendszerek 1 A Start 0
- Page 121 and 122:
Bemenetek Kimenetek Pneumatikus ren
- Page 123 and 124:
Pneumatikus rendszerek Tárolólán
- Page 125 and 126:
Pneumatikus rendszerek Egy kulcsos
- Page 127 and 128:
Pneumatikus rendszerek meg, míg a
- Page 129 and 130:
Pneumatikus rendszerek 6.3.3. Útve
- Page 131 and 132:
Pneumatikus rendszerek Villamos kap
- Page 133 and 134:
Pneumatikus rendszerek Végrehajtó
- Page 135 and 136:
A programozható vezérlők alkalma
- Page 137 and 138:
A programozható vezérlők alkalma
- Page 139 and 140: A programozható vezérlők alkalma
- Page 141 and 142: A programozható vezérlők alkalma
- Page 143 and 144: A programozható vezérlők alkalma
- Page 145 and 146: A programozható vezérlők alkalma
- Page 147 and 148: A programozható vezérlők alkalma
- Page 149 and 150: A programozható vezérlők alkalma
- Page 151 and 152: A programozható vezérlők alkalma
- Page 153 and 154: A programozható vezérlők alkalma
- Page 155 and 156: A programozható vezérlők alkalma
- Page 157 and 158: A programozható vezérlők alkalma
- Page 159 and 160: 7.4.2.4. Funkcióblokkos programoz
- Page 161 and 162: 7.4.3. A PLC program végrehajtás
- Page 163 and 164: A programozható vezérlők alkalma
- Page 165 and 166: A programozható vezérlők alkalma
- Page 167 and 168: A programozható vezérlők alkalma
- Page 169 and 170: A programozható vezérlők alkalma
- Page 171 and 172: A programozható vezérlők alkalma
- Page 173 and 174: A programozható vezérlők alkalma
- Page 175 and 176: A programozható vezérlők alkalma
- Page 177 and 178: A programozható vezérlők alkalma
- Page 179 and 180: A programozható vezérlők alkalma
- Page 181 and 182: A programozható vezérlők alkalma
- Page 183 and 184: A programozható vezérlők alkalma
- Page 185 and 186: A programozható vezérlők alkalma
- Page 187 and 188: A programozható vezérlők alkalma
- Page 189: Irodalom 18. McKerrow, Ph., J.: Int
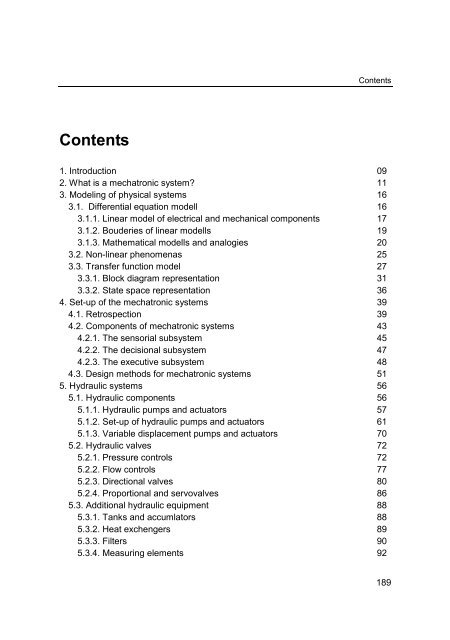
- Page 193 and 194: Contents 7.4.3. Program implementat
- Page 195 and 196: Inhalt Inhalt 1. Einführung 2. Was
- Page 197 and 198: Inhalt 7.5. Kommunication der Speic
- Page 199 and 200: Cuprins Cuprins 1. Introducere 2. C
- Page 201 and 202: Cuprins 7.4.3. Modurile de execuţi