Bevezetés a mechatronikába - MEK
Bevezetés a mechatronikába - MEK
Bevezetés a mechatronikába - MEK

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Fizikai rendszerek modellezése<br />
teljesítményhez. Ennek ellenére, ami a rendszerrel megvalósítandó követelményeket<br />
illeti, ezen utóbbiak tükrében érzékelhető a legjobban a rendszerek hatásfoka.<br />
i(t)<br />
M<br />
k<br />
B<br />
g<br />
M<br />
t<br />
K<br />
K g<br />
r<br />
x t<br />
x k<br />
x f<br />
dx t<br />
dt<br />
dx k<br />
dt<br />
dx f<br />
dt<br />
2<br />
d<br />
Mt x t<br />
dt 2<br />
f a i(t)<br />
2 f a i(t)<br />
d<br />
Mk x<br />
2 k<br />
dt<br />
Bg<br />
dxf<br />
/ dt<br />
M t<br />
dxk<br />
/ dt<br />
Kr<br />
xk<br />
Kr<br />
xk<br />
Kg<br />
xf<br />
xt<br />
xt<br />
xk<br />
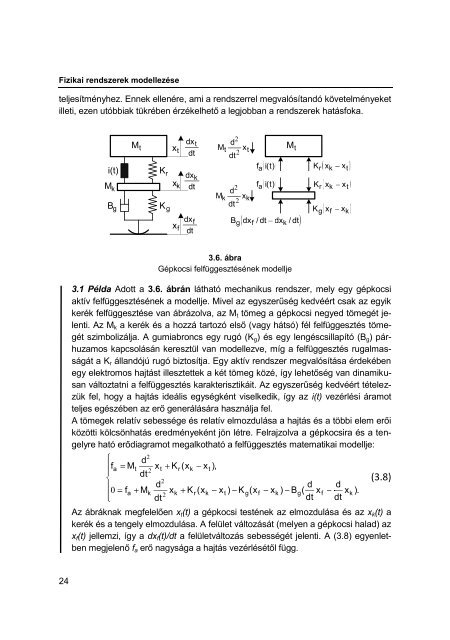
3.6. ábra<br />
Gépkocsi felfüggesztésének modellje<br />
3.1 Példa Adott a 3.6. ábrán látható mechanikus rendszer, mely egy gépkocsi<br />
aktív felfüggesztésének a modellje. Mivel az egyszerűség kedvéért csak az egyik<br />
kerék felfüggesztése van ábrázolva, az M t tömeg a gépkocsi negyed tömegét jelenti.<br />
Az M k a kerék és a hozzá tartozó első (vagy hátsó) fél felfüggesztés tömegét<br />
szimbolizálja. A gumiabroncs egy rugó (K g ) és egy lengéscsillapító (B g ) párhuzamos<br />
kapcsolásán keresztül van modellezve, míg a felfüggesztés rugalmasságát<br />
a K r állandójú rugó biztosítja. Egy aktív rendszer megvalósítása érdekében<br />
egy elektromos hajtást illesztettek a két tömeg közé, így lehetőség van dinamikusan<br />
változtatni a felfüggesztés karakterisztikáit. Az egyszerűség kedvéért tételezzük<br />
fel, hogy a hajtás ideális egységként viselkedik, így az i(t) vezérlési áramot<br />
teljes egészében az erő generálására használja fel.<br />
A tömegek relatív sebessége és relatív elmozdulása a hajtás és a többi elem erői<br />
közötti kölcsönhatás eredményeként jön létre. Felrajzolva a gépkocsira és a tengelyre<br />
ható erődiagramot megalkotható a felfüggesztés matematikai modellje:<br />
f<br />
a<br />
0<br />
f<br />
M<br />
a<br />
t<br />
d<br />
dt<br />
M<br />
2<br />
2<br />
k<br />
x<br />
d<br />
t<br />
dt<br />
2<br />
2<br />
K (x<br />
x<br />
k<br />
r<br />
k<br />
K (x<br />
r<br />
x ),<br />
k<br />
t<br />
x )<br />
t<br />
K<br />
g<br />
(x<br />
f<br />
x<br />
k<br />
)<br />
B<br />
g<br />
(<br />
d<br />
dt<br />
x<br />
f<br />
d<br />
dt<br />
x<br />
k<br />
).<br />
(3.8)<br />
Az ábráknak megfelelően x t (t) a gépkocsi testének az elmozdulása és az x k (t) a<br />
kerék és a tengely elmozdulása. A felület változását (melyen a gépkocsi halad) az<br />
x f (t) jellemzi, így a dx f (t)/dt a felületváltozás sebességét jelenti. A (3.8) egyenletben<br />
megjelenő f a erő nagysága a hajtás vezérlésétől függ.<br />
24