Bevezetés a mechatronikába - MEK
Bevezetés a mechatronikába - MEK
Bevezetés a mechatronikába - MEK

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
A mechatronikai rendszer felépítése<br />
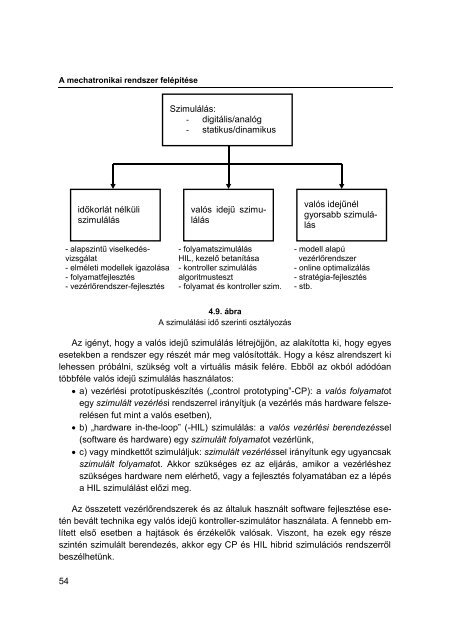
Szimulálás:<br />
- digitális/analóg<br />
- statikus/dinamikus<br />
időkorlát nélküli<br />
szimulálás<br />
valós idejű szimulálás<br />
valós idejűnél<br />
gyorsabb szimulálás<br />
- alapszintű viselkedésvizsgálat<br />
- elméleti modellek igazolása<br />
- folyamatfejlesztés<br />
- vezérlőrendszer-fejlesztés<br />
- folyamatszimulálás<br />
HIL, kezelő betanítása<br />
- kontroller szimulálás<br />
algoritmusteszt<br />
- folyamat és kontroller szim.<br />
- modell alapú<br />
vezérlőrendszer<br />
- online optimalizálás<br />
- stratégia-fejlesztés<br />
- stb.<br />
54<br />
4.9. ábra<br />
A szimulálási idő szerinti osztályozás<br />
Az igényt, hogy a valós idejű szimulálás létrejöjjön, az alakította ki, hogy egyes<br />
esetekben a rendszer egy részét már meg valósították. Hogy a kész alrendszert ki<br />
lehessen próbálni, szükség volt a virtuális másik felére. Ebből az okból adódóan<br />
többféle valós idejű szimulálás használatos:<br />
a) vezérlési prototípuskészítés („control prototyping”-CP): a valós folyamatot<br />
egy szimulált vezérlési rendszerrel irányítjuk (a vezérlés más hardware felszerelésen<br />
fut mint a valós esetben),<br />
b) „hardware in-the-loop” (-HIL) szimulálás: a valós vezérlési berendezéssel<br />
(software és hardware) egy szimulált folyamatot vezérlünk,<br />
c) vagy mindkettőt szimuláljuk: szimulált vezérléssel irányítunk egy ugyancsak<br />
szimulált folyamatot. Akkor szükséges ez az eljárás, amikor a vezérléshez<br />
szükséges hardware nem elérhető, vagy a fejlesztés folyamatában ez a lépés<br />
a HIL szimulálást előzi meg.<br />
Az összetett vezérlőrendszerek és az általuk használt software fejlesztése esetén<br />
bevált technika egy valós idejű kontroller-szimulátor használata. A fennebb említett<br />
első esetben a hajtások és érzékelők valósak. Viszont, ha ezek egy része<br />
szintén szimulált berendezés, akkor egy CP és HIL hibrid szimulációs rendszerről<br />
beszélhetünk.