Bevezetés a mechatronikába - MEK
Bevezetés a mechatronikába - MEK
Bevezetés a mechatronikába - MEK

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Pneumatikus rendszerek<br />
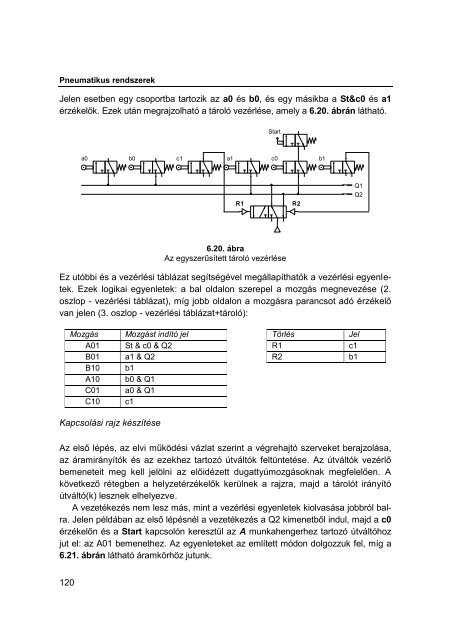
Jelen esetben egy csoportba tartozik az a0 és b0, és egy másikba a St&c0 és a1<br />
érzékelők. Ezek után megrajzolható a tároló vezérlése, amely a 6.20. ábrán látható.<br />
Start<br />
a0<br />
b0 c1<br />
a1 c0<br />
b1<br />
R1<br />
R2<br />
Q1<br />
Q2<br />
6.20. ábra<br />
Az egyszerűsített tároló vezérlése<br />
Ez utóbbi és a vezérlési táblázat segítségével megállapíthatók a vezérlési egyenletek.<br />
Ezek logikai egyenletek: a bal oldalon szerepel a mozgás megnevezése (2.<br />
oszlop - vezérlési táblázat), míg jobb oldalon a mozgásra parancsot adó érzékelő<br />
van jelen (3. oszlop - vezérlési táblázat+tároló):<br />
Mozgás Mozgást indító jel Törlés Jel<br />
A01 St & c0 & Q2 R1 c1<br />
B01 a1 & Q2 R2 b1<br />
B10 b1<br />
A10 b0 & Q1<br />
C01 a0 & Q1<br />
C10 c1<br />
Kapcsolási rajz készítése<br />
Az első lépés, az elvi működési vázlat szerint a végrehajtó szerveket berajzolása,<br />
az áramirányítók és az ezekhez tartozó útváltók feltüntetése. Az útváltók vezérlő<br />
bemeneteit meg kell jelölni az előidézett dugattyúmozgásoknak megfelelően. A<br />
következő rétegben a helyzetérzékelők kerülnek a rajzra, majd a tárolót irányító<br />
útváltó(k) lesznek elhelyezve.<br />
A vezetékezés nem lesz más, mint a vezérlési egyenletek kiolvasása jobbról balra.<br />
Jelen példában az első lépésnél a vezetékezés a Q2 kimenetből indul, majd a c0<br />
érzékelőn és a Start kapcsolón keresztül az A munkahengerhez tartozó útváltóhoz<br />
jut el: az A01 bemenethez. Az egyenleteket az említett módon dolgozzuk fel, míg a<br />
6.21. ábrán látható áramkörhöz jutunk.<br />
120