Bevezetés a mechatronikába - MEK
Bevezetés a mechatronikába - MEK
Bevezetés a mechatronikába - MEK

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
A programozható vezérlők alkalmazása<br />
A strukturált szervezésű programok főprogramból és alprogrammodulokból<br />
(taszkok, szubrutinok) állnak. A programmodulok paraméterezhetők, többször is<br />
hívhatók és egymásba ágyazhatók. A strukturált ciklikus feldolgozású PLC-k előnye,<br />
hogy a modulok az ismétlődő programrészek egyszerű programozására adnak<br />
lehetőséget. Hátrányuk, hogy a programozásuk mélyebb programozási ismereteket<br />
igényel és a válaszidő meghatározása nehézkes. Ilyen feldolgozásra csak<br />
olyan PLC-k alkalmasak, amelyek utasításkészlete szubrutinhívást, megszakításkezelést,<br />
stb. tartalmaz. A strukturált ciklikus PLC-ket némely irodalomban aciklikus<br />
program-végrehajtású PLC-knek nevezik.<br />
7.4.3.1. Ciklusidő<br />
A lineáris, ciklikus működésű PLC tehát az utasításokat ciklikusan, egymás után<br />
hajtja végre. Az utolsó utasítás végrehajtása után visszatér a program elejére. A<br />
program egyszeri végrehajtási idejét nevezzük programletapogatási időnek (scan<br />
time) vagy ciklusidőnek (cycle time). Ez az idő függ a program méretétől és a processzor<br />
sebességétől, de tekinthető tipikusan 1-5 ms/Kb-nak.<br />
Bemenetek<br />
olvasása<br />
Kimenetek<br />
írása<br />
Bemenet<br />
változása<br />
Változás<br />
beolvasása<br />
Bemenet<br />
Bemenet<br />
Kimenetváltás<br />
Kimenetváltás<br />
Kimenet<br />
Kimenet<br />
Program<br />
letapogatás<br />
Valós<br />
kimenetváltás<br />
Program<br />
letapogatás<br />
Program<br />
letapogatás<br />
Valós<br />
kimenetváltás<br />
Válaszidő<br />
Válaszidő<br />
a) b)<br />
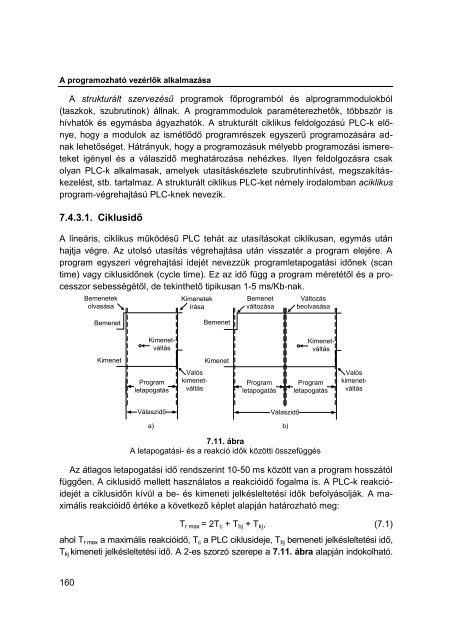
7.11. ábra<br />
A letapogatási- és a reakció idők közötti összefüggés<br />
Az átlagos letapogatási idő rendszerint 10-50 ms között van a program hosszától<br />
függően. A ciklusidő mellett használatos a reakcióidő fogalma is. A PLC-k reakcióidejét<br />
a ciklusidőn kívül a be- és kimeneti jelkésleltetési idők befolyásolják. A maximális<br />
reakcióidő értéke a következő képlet alapján határozható meg:<br />
T r max = 2T c + T bj + T kj , (7.1)<br />
ahol T r max a maximális reakcióidő, T c a PLC ciklusideje, T bj bemeneti jelkésleltetési idő,<br />
T kj kimeneti jelkésleltetési idő. A 2-es szorzó szerepe a 7.11. ábra alapján indokolható.<br />
160