Bevezetés a mechatronikába - MEK
Bevezetés a mechatronikába - MEK
Bevezetés a mechatronikába - MEK

You also want an ePaper? Increase the reach of your titles
YUMPU automatically turns print PDFs into web optimized ePapers that Google loves.
Pneumatikus rendszerek<br />
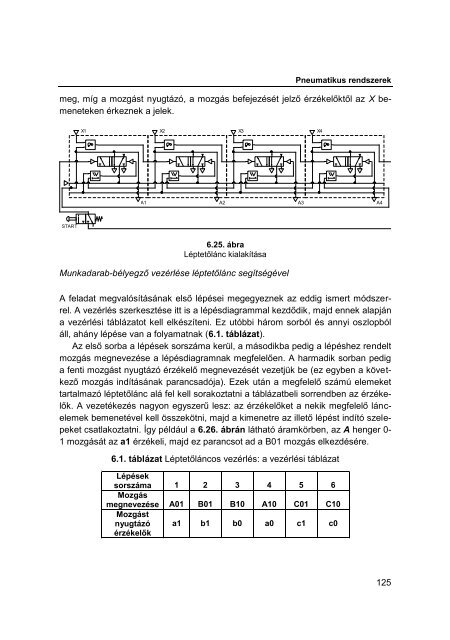
meg, míg a mozgást nyugtázó, a mozgás befejezését jelző érzékelőktől az X bemeneteken<br />
érkeznek a jelek.<br />
X1 X2 X3 X4<br />
A1 A2 A3 A4<br />
START<br />
6.25. ábra<br />
Léptetőlánc kialakítása<br />
Munkadarab-bélyegző vezérlése léptetőlánc segítségével<br />
A feladat megvalósításának első lépései megegyeznek az eddig ismert módszerrel.<br />
A vezérlés szerkesztése itt is a lépésdiagrammal kezdődik, majd ennek alapján<br />
a vezérlési táblázatot kell elkészíteni. Ez utóbbi három sorból és annyi oszlopból<br />
áll, ahány lépése van a folyamatnak (6.1. táblázat).<br />
Az első sorba a lépések sorszáma kerül, a másodikba pedig a lépéshez rendelt<br />
mozgás megnevezése a lépésdiagramnak megfelelően. A harmadik sorban pedig<br />
a fenti mozgást nyugtázó érzékelő megnevezését vezetjük be (ez egyben a következő<br />
mozgás indításának parancsadója). Ezek után a megfelelő számú elemeket<br />
tartalmazó léptetőlánc alá fel kell sorakoztatni a táblázatbeli sorrendben az érzékelők.<br />
A vezetékezés nagyon egyszerű lesz: az érzékelőket a nekik megfelelő láncelemek<br />
bemenetével kell összekötni, majd a kimenetre az illető lépést indító szelepeket<br />
csatlakoztatni. Így például a 6.26. ábrán látható áramkörben, az A henger 0-<br />
1 mozgását az a1 érzékeli, majd ez parancsot ad a B01 mozgás elkezdésére.<br />
6.1. táblázat Léptetőláncos vezérlés: a vezérlési táblázat<br />
Lépések<br />
sorszáma 1 2 3 4 5 6<br />
Mozgás<br />
megnevezése A01 B01 B10 A10 C01 C10<br />
Mozgást<br />
nyugtázó<br />
érzékelők<br />
a1 b1 b0 a0 c1 c0<br />
125