- Page 2 and 3:
Spis treściPrzedmowa . . . . . . .
- Page 4 and 5:
SPIS TREŚCI 47.4.4 Projektowanie f
- Page 6 and 7:
Przedmowa 6metody oszczędnego pró
- Page 8 and 9:
ROZDZIAŁ 1. POJĘCIA WSTĘPNE 8ła
- Page 10 and 11:
ROZDZIAŁ 1. POJĘCIA WSTĘPNE 101.
- Page 12 and 13:
ROZDZIAŁ 1. POJĘCIA WSTĘPNE 121x
- Page 14 and 15:
ROZDZIAŁ 1. POJĘCIA WSTĘPNE 141x
- Page 16 and 17:
ROZDZIAŁ 1. POJĘCIA WSTĘPNE 161x
- Page 18 and 19:
ROZDZIAŁ 1. POJĘCIA WSTĘPNE 18rz
- Page 20 and 21:
ROZDZIAŁ 1. POJĘCIA WSTĘPNE 20ci
- Page 22 and 23:
Rozdział 2Przestrzenie sygnałówW
- Page 24 and 25:
ROZDZIAŁ 2. PRZESTRZENIE SYGNAŁÓ
- Page 26 and 27:
ROZDZIAŁ 2. PRZESTRZENIE SYGNAŁÓ
- Page 29 and 30:
ROZDZIAŁ 2. PRZESTRZENIE SYGNAŁÓ
- Page 31 and 32:
ROZDZIAŁ 2. PRZESTRZENIE SYGNAŁÓ
- Page 33 and 34:
ROZDZIAŁ 2. PRZESTRZENIE SYGNAŁÓ
- Page 35 and 36:
ROZDZIAŁ 2. PRZESTRZENIE SYGNAŁÓ
- Page 37 and 38:
ROZDZIAŁ 2. PRZESTRZENIE SYGNAŁÓ
- Page 39 and 40:
ROZDZIAŁ 2. PRZESTRZENIE SYGNAŁÓ
- Page 41 and 42:
ROZDZIAŁ 2. PRZESTRZENIE SYGNAŁÓ
- Page 43 and 44:
ROZDZIAŁ 2. PRZESTRZENIE SYGNAŁÓ
- Page 45 and 46:
ROZDZIAŁ 2. PRZESTRZENIE SYGNAŁÓ
- Page 47 and 48:
Rozdział 3Transformata FourieraGł
- Page 49 and 50:
ROZDZIAŁ 3. TRANSFORMATA FOURIERA
- Page 51 and 52:
ROZDZIAŁ 3. TRANSFORMATA FOURIERA
- Page 53 and 54:
ROZDZIAŁ 3. TRANSFORMATA FOURIERA
- Page 55 and 56:
ROZDZIAŁ 3. TRANSFORMATA FOURIERA
- Page 57 and 58:
ROZDZIAŁ 3. TRANSFORMATA FOURIERA
- Page 59 and 60:
Rozdział 4Próbkowanie sygnałówW
- Page 61 and 62:
ROZDZIAŁ 4. PRÓBKOWANIE SYGNAŁÓ
- Page 63 and 64: ROZDZIAŁ 4. PRÓBKOWANIE SYGNAŁÓ
- Page 65 and 66: ROZDZIAŁ 4. PRÓBKOWANIE SYGNAŁÓ
- Page 67 and 68: ROZDZIAŁ 4. PRÓBKOWANIE SYGNAŁÓ
- Page 69 and 70: ROZDZIAŁ 4. PRÓBKOWANIE SYGNAŁÓ
- Page 71 and 72: ROZDZIAŁ 4. PRÓBKOWANIE SYGNAŁÓ
- Page 73 and 74: ROZDZIAŁ 4. PRÓBKOWANIE SYGNAŁÓ
- Page 75 and 76: ROZDZIAŁ 4. PRÓBKOWANIE SYGNAŁÓ
- Page 77 and 78: ROZDZIAŁ 5. DYSKRETNA TRANSFORMATA
- Page 79 and 80: ROZDZIAŁ 5. DYSKRETNA TRANSFORMATA
- Page 81 and 82: ROZDZIAŁ 6. FILTRY ANALOGOWE 81spo
- Page 83 and 84: ROZDZIAŁ 6. FILTRY ANALOGOWE 836.2
- Page 85 and 86: ROZDZIAŁ 6. FILTRY ANALOGOWE 85Uk
- Page 87 and 88: ROZDZIAŁ 6. FILTRY ANALOGOWE 87Kor
- Page 89 and 90: ROZDZIAŁ 6. FILTRY ANALOGOWE 89Rys
- Page 91 and 92: ROZDZIAŁ 6. FILTRY ANALOGOWE 91Tab
- Page 93 and 94: ROZDZIAŁ 6. FILTRY ANALOGOWE 936.4
- Page 95 and 96: ROZDZIAŁ 6. FILTRY ANALOGOWE 95Po
- Page 97 and 98: ROZDZIAŁ 6. FILTRY ANALOGOWE 97Z t
- Page 99 and 100: ROZDZIAŁ 6. FILTRY ANALOGOWE 996.4
- Page 101 and 102: ROZDZIAŁ 6. FILTRY ANALOGOWE 101p
- Page 103 and 104: ROZDZIAŁ 6. FILTRY ANALOGOWE 1031C
- Page 105 and 106: ROZDZIAŁ 6. FILTRY ANALOGOWE 105bi
- Page 107 and 108: ROZDZIAŁ 7. FILTRY CYFROWE 107•
- Page 109 and 110: ROZDZIAŁ 7. FILTRY CYFROWE 109wani
- Page 111 and 112: ROZDZIAŁ 7. FILTRY CYFROWE 111
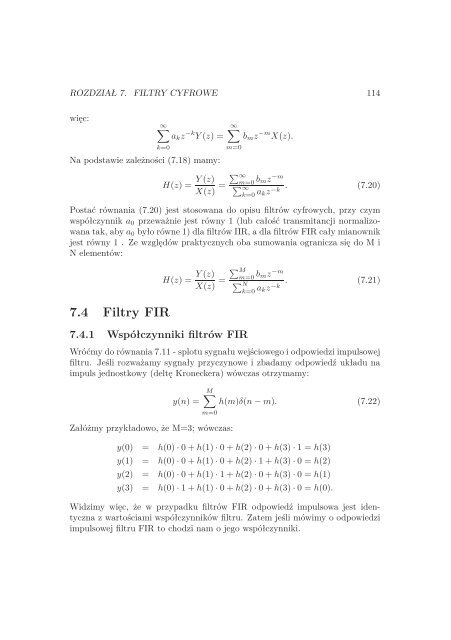
- Page 113: ROZDZIAŁ 7. FILTRY CYFROWE 113Prak
- Page 117 and 118: ROZDZIAŁ 7. FILTRY CYFROWE 117W ta
- Page 119 and 120: ROZDZIAŁ 7. FILTRY CYFROWE 1191.22
- Page 121 and 122: ROZDZIAŁ 7. FILTRY CYFROWE 121100
- Page 123 and 124: ROZDZIAŁ 7. FILTRY CYFROWE 1230.25
- Page 125 and 126: ROZDZIAŁ 7. FILTRY CYFROWE 1250.25
- Page 127 and 128: ROZDZIAŁ 7. FILTRY CYFROWE 1270−
- Page 129 and 130: ROZDZIAŁ 7. FILTRY CYFROWE 1291. o
- Page 131 and 132: ROZDZIAŁ 7. FILTRY CYFROWE 1317.5.
- Page 133 and 134: ROZDZIAŁ 7. FILTRY CYFROWE 1337.6.
- Page 135 and 136: ROZDZIAŁ 7. FILTRY CYFROWE 135Rysu
- Page 137 and 138: ROZDZIAŁ 7. FILTRY CYFROWE 1377.6.
- Page 139 and 140: ROZDZIAŁ 7. FILTRY CYFROWE 139Ts=1
- Page 141 and 142: ROZDZIAŁ 7. FILTRY CYFROWE 141f =
- Page 143 and 144: ROZDZIAŁ 7. FILTRY CYFROWE 143
- Page 145 and 146: ROZDZIAŁ 7. FILTRY CYFROWE 145Na k
- Page 147 and 148: ROZDZIAŁ 7. FILTRY CYFROWE 1477.8.
- Page 149 and 150: Bibliografia[1] Izydorczyk J., Pło