PDF-Datei | 2 MB - IFSH
PDF-Datei | 2 MB - IFSH
PDF-Datei | 2 MB - IFSH

Sie wollen auch ein ePaper? Erhöhen Sie die Reichweite Ihrer Titel.
YUMPU macht aus Druck-PDFs automatisch weboptimierte ePaper, die Google liebt.
146<br />
Das Forschungsinstitut für Optronik und Mustererkennung (FOM) bearbeitet abbildende<br />
Sensorik. Schwerpunkte liegen bei Nachrichtengewinnung und Aufklärung und bei der Verbesserung<br />
der Waffenwirkung „für den Soldaten und für autonome Systeme mit optronischen<br />
Komponenten“. Dabei werden Daten verschiedener Sensoren kombiniert. Die Abteilung Szenenanalyse<br />
arbeitet u.a. an der Auswertung multisensorieller Daten von luft- und raumgetragenen<br />
Aufklärungssystemen. In der Abteilung Zielerkennung werden u.a. automatische Verfahren<br />
zur Objekterkennung für autonome Flugkörper und Drohnen entwickelt. 275<br />
3.5.6 European Land-Robot Trial<br />
Der erste dieser Wettbewerbe für autonome Landfahrzeuge wurde 2006 – wohl inspiriert<br />
durch den Grand Challenge der US-DARPA (s. Abschnitt 2.1.2.1) – von der Bundeswehr<br />
durchgeführt, 276 im jährlichen Wechsel gibt es eine zivile und eine militärische Veranstaltung;<br />
2008 findet die militärische M-ELROB am 30. Juni bis 3. Juli in Hammelburg statt. Zu den<br />
Wettbewerbern gehören große Rüstungsunternehmen, kleine Betriebe und Hochschulinstitute;<br />
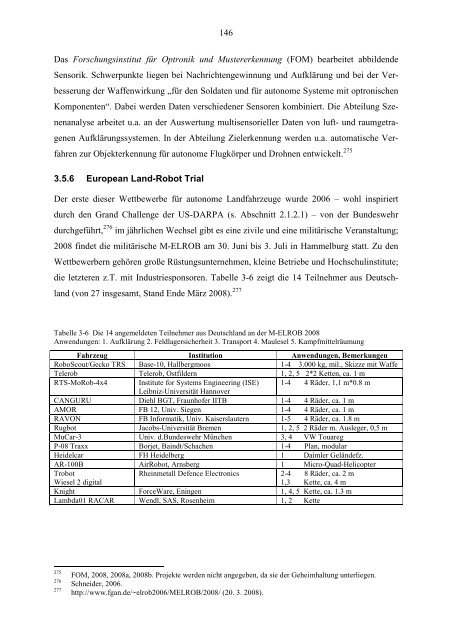
die letzteren z.T. mit Industriesponsoren. Tabelle 3-6 zeigt die 14 Teilnehmer aus Deutschland<br />
(von 27 insgesamt, Stand Ende März 2008). 277<br />
Tabelle 3-6 Die 14 angemeldeten Teilnehmer aus Deutschland an der M-ELROB 2008<br />
Anwendungen: 1. Aufklärung 2. Feldlagersicherheit 3. Transport 4. Maulesel 5. Kampfmittelräumung<br />
Fahrzeug Institution Anwendungen, Bemerkungen<br />
RoboScout/Gecko TRS Base-10, Hallbergmoos 1-4 3.000 kg, mil., Skizze mit Waffe<br />
Telerob Telerob, Ostfildern 1, 2, 5 2*2 Ketten, ca. 1 m<br />
RTS-MoRob-4x4 Institute for Systems Engineering (ISE) 1-4 4 Räder, 1,1 m*0.8 m<br />
Leibniz-Universität Hannover<br />
CANGURU Diehl BGT, Fraunhofer IITB 1-4 4 Räder, ca. 1 m<br />
AMOR FB 12, Univ. Siegen 1-4 4 Räder, ca. 1 m<br />
RAVON FB Informatik, Univ. Kaiserslautern 1-5 4 Räder, ca. 1.8 m<br />
Rugbot Jacobs-Universität Bremen 1, 2, 5 2 Räder m. Ausleger, 0,5 m<br />
MuCar-3 Univ. d.Bundeswehr München 3, 4 VW Touareg<br />
P-08 Traxx Borjet, Baindt/Schachen 1-4 Plan, modular<br />
Heidelcar FH Heidelberg 1 Daimler Geländefz.<br />
AR-100B AirRobot, Arnsberg 1 Micro-Quad-Helicopter<br />
Trobot<br />
Rheinmetall Defence Electronics 2-4 8 Räder, ca. 2 m<br />
Wiesel 2 digital<br />
1,3 Kette, ca. 4 m<br />
Knight ForceWare, Eningen 1, 4, 5 Kette, ca. 1.3 m<br />
Lambda01 RACAR Wendl, SAS, Rosenheim 1, 2 Kette<br />
275<br />
276<br />
277<br />
FOM, 2008, 2008a, 2008b. Projekte werden nicht angegeben, da sie der Geheimhaltung unterliegen.<br />
Schneider, 2006.<br />
http://www.fgan.de/~elrob2006/MELROB/2008/ (20. 3. 2008).